Lokomotiv-Fahrsimulator
Dies ist die im Frühjahr 1992 an der Ingenieurschule Juventus in Zürich eingereichte Dokumentation meiner HTL-Diplomarbeit.
Unter HTL bzw. Ingenieurschule ist die damalige Höhere Technische Lehranstalt gemeint, die der heutigen Fachhochschule bzw. einem Bachelor-Lehrgang entspricht.
Die nur in Papierform vorhandene Diplomarbeit wurde eingescannt, mit einer OCR-SW maschinenlesbar gemacht und danach als HTML-Seite aufbereitet.
Der in der damals weitverbreiteten Programmierhochsprache «TurboPascal für MS-DOS» geschriebene Quellcode und auch das ausführbare Programm sind leider unauffindbar.
Viel Spass bei der Lektüre!
(Das Original wurde zwischen Oktober 1991 und Februar 1992 erstellt.)
1. Software-Produktbild SWP (Analyse)
1.1 Einleitung
1.2 Erläuterungen zum triebfahrzeugseitigen Bahnbetrieb
1.3 Erläuterungen zum fahrdienstseitigen Bahnbetrieb
1.4 Die Bogenfahrt
1.5 Neigung des befahrenen Streckenabschnittes
1.6 Literaturverzeichnis und Ansprechpartner
2. Software-Anforderungsspezifikation SAS
2.1 Simulierter Lokomotivtyp → SBB Re 6/6
2.2 Simulierte Anhängelast
2.3 Ausgangslage bei Simulationsbeginn (Randbedingungen)
2.4 Man-Machine-Interface (MMI)
2.5 Das Grobkonzept für den Fahrsimulator
2.6 Bedienung der Lokomotive
2.7 Berechnungsgrundlagen → Fahren & Bremsen
2.8 Berechnungsgrundlagen → Fahrwiderstände
2.9 Visualisierung → Oberleitungen zeichnen
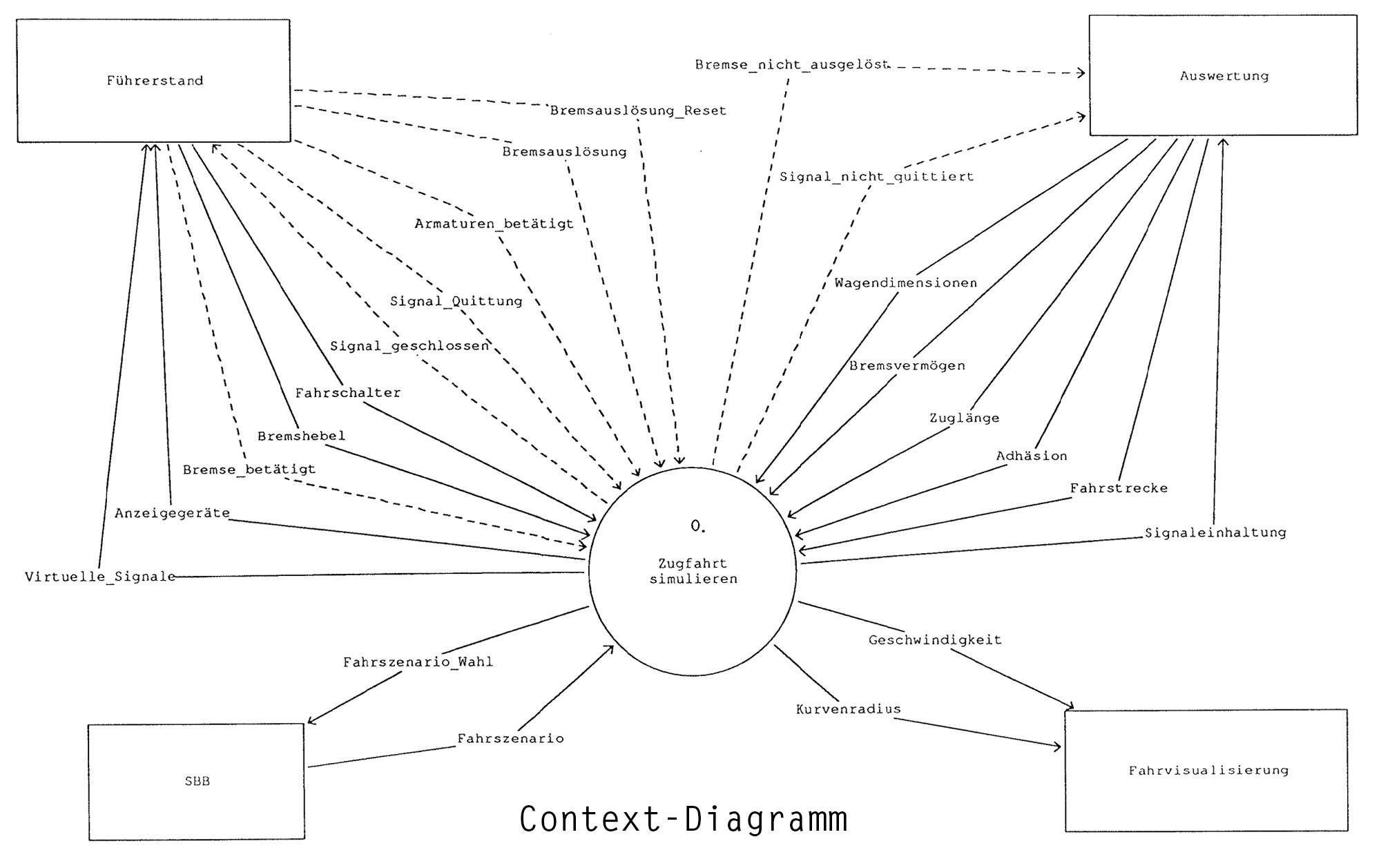
3.1 Context-Diagramm
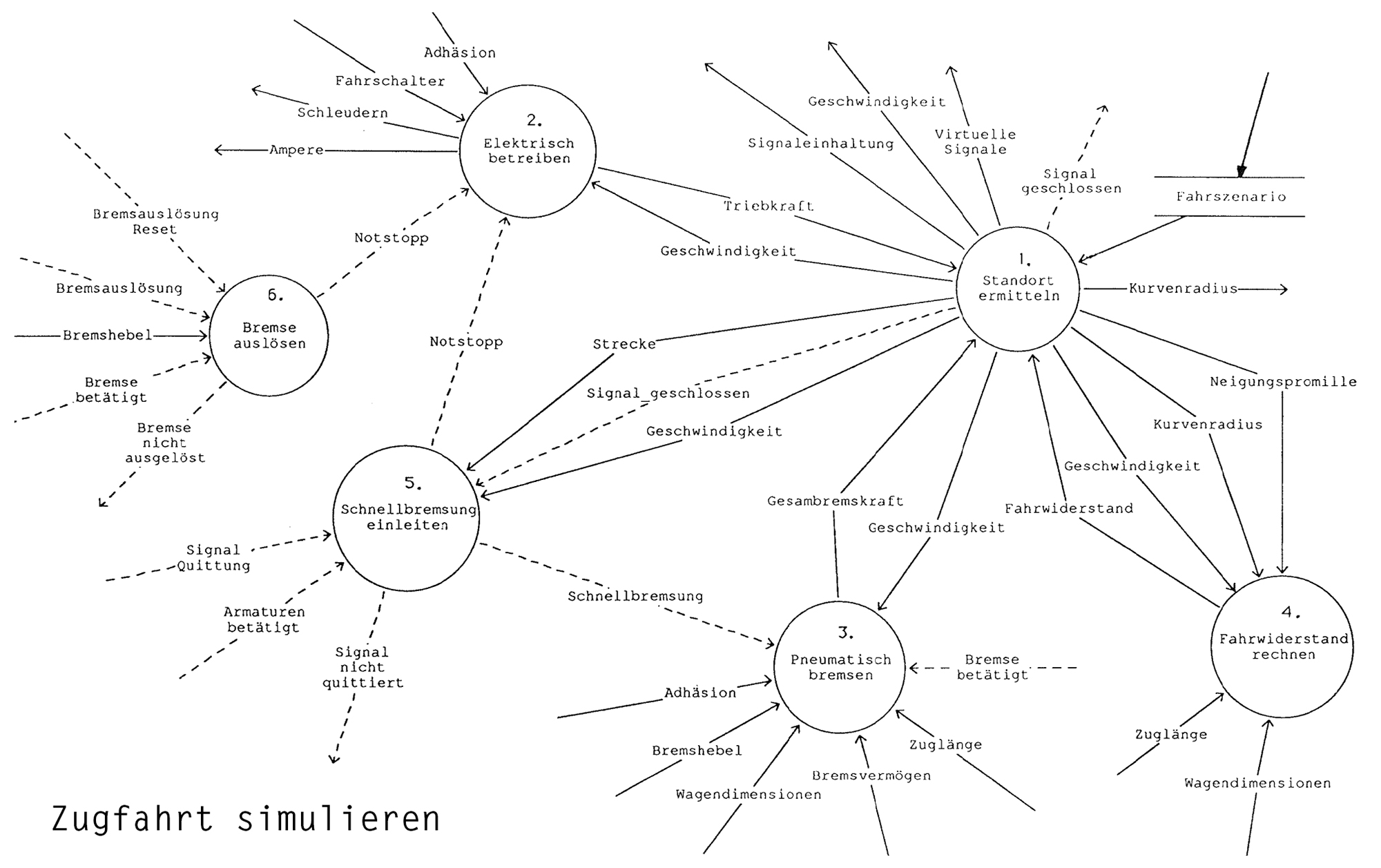
3.2 Zugfahrt simulieren
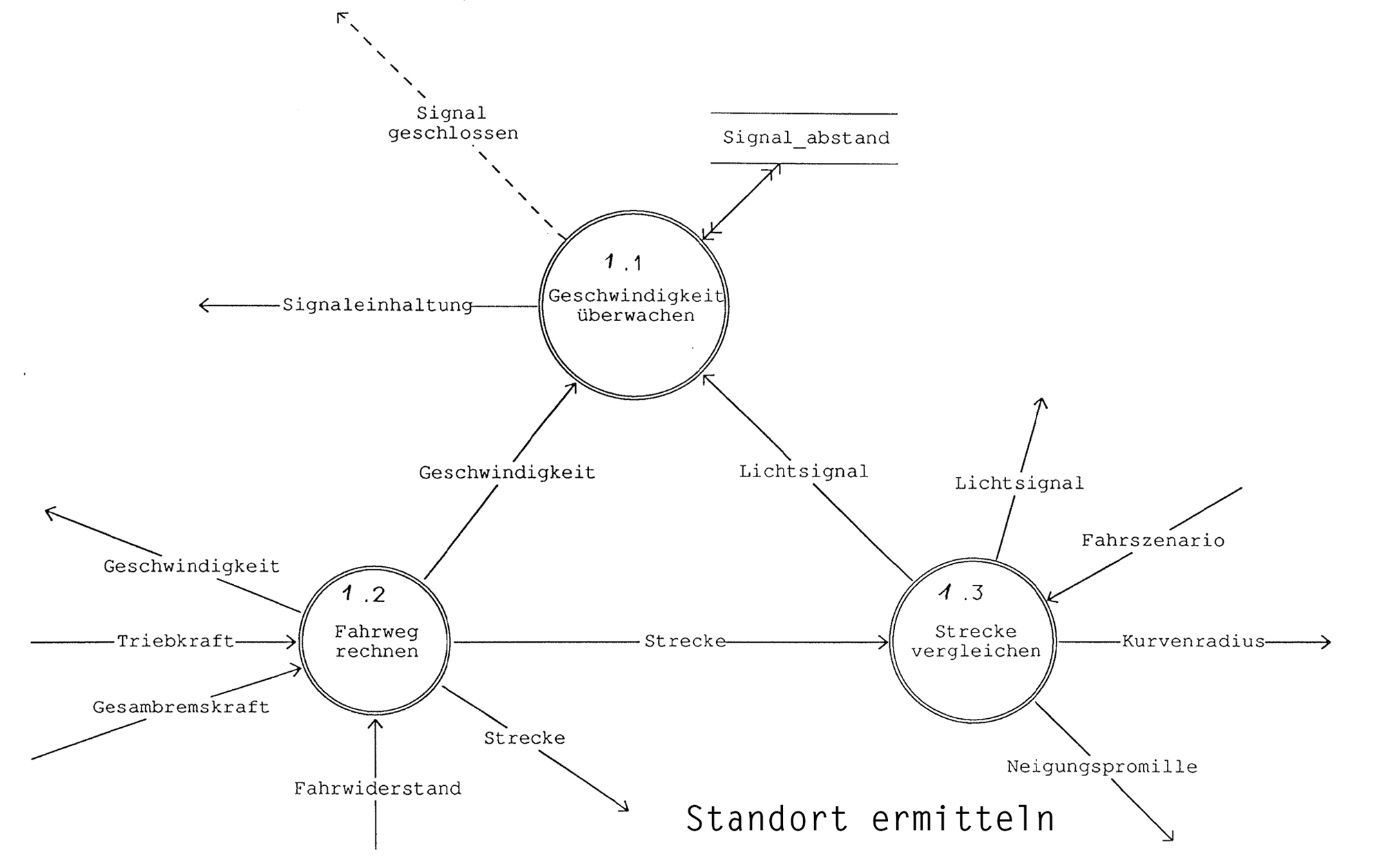
3.3 Standort ermitteln
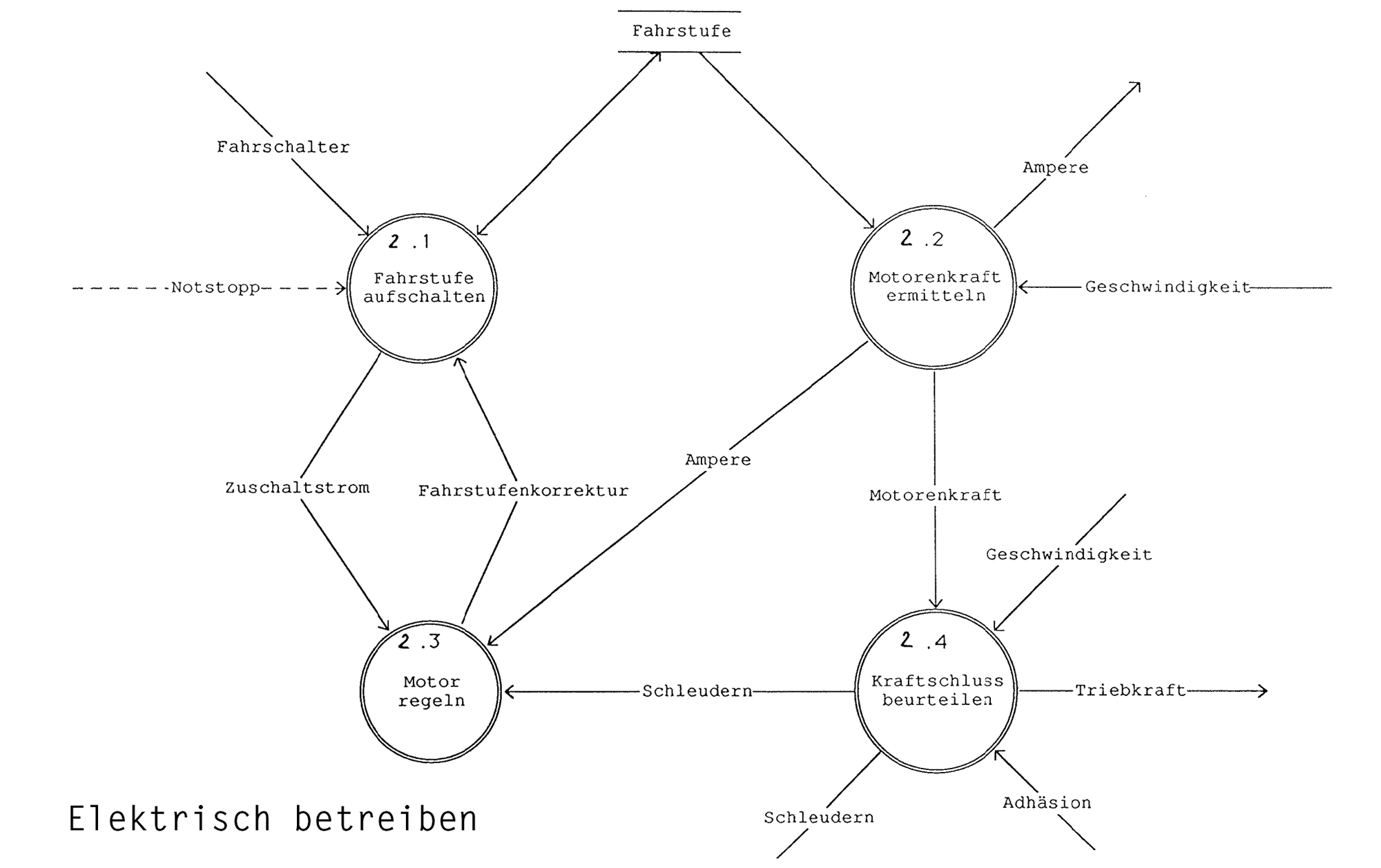
3.4 Elektrisch betreiben
3.5 Pneumatisch betreiben
3.6 Fahrwiderstand berechnen
3.7 Schnellbremsung einleiten
3.8 Bremse auslösen
3.9 Sicherheits Langsamgang
3.10 Sicherheits Schnellgang
3.11 Ueberbremsungs Kontroller
4. Data-Dictionary
5. Process-Specifications
6. Programmier-Modulaufteilung
7. Nassi-Shneidermann-Diagramme
8. Das Fahrszenario
9. Das Benutzerhandbuch
0. Der Werbe-Flyer
Unerlässliches Hilfsmittel in der Lokführer*innenausbildung ist der Simulator, der fahrzeugunabhängiges Durchspielen von Übungsfahrten erlaubt. Der Lokomotiv-Fahrsimulator ist ein solcher Simulator mit dem in Echtzeit eine fiktive Fahrt mit der SBB-Elektrolokomotive vom Typ Re 6/6 gemacht werden kann. Das Modell der zu simulierenden Lokomotive ist von auf vernünftigem Masse reduzierter Komplexität, jedoch ohne betriebsrelevanten Einschränkungen und Abstriche. Die dabei involvierten physikalischen Zusammenhänge wurden möglichst wirklichkeitsgetreu nachgebildet. Was wird geboten? Die Lokomotive wird auf einem DOS-Personalcomputer simuliert. Die Eingabemöglichkeiten (über PC-Tastatur) umfassen die wichtigsten Bedienelemente der Lokomotive, wie... • Fahrschalthebel mit den Stellungen F++, F+, M, F•, F-, 0, B-, B•, B+ • 9-stufiger Bremshebel • Bremsauslösung der Lokomotivbremsen Die Ausgabe erfolgt auf dem Bildschirm und besteht aus... • Führerstandsaufbauten (Kulisse) • Anzeigeinstrumente für Fahrmotorstrom, Geschwindigkeit, Hauptleitungsdruck und Bremszylinderdruck (Rundinstrumente) • Schleuder- und Signalwarnanzeige • Anzeigefeld für virtuelle Signale (Lichtsignale) • Sicht aus dem Frontfenster der Lokomotive Über die Tastatur kann die Lokomotive vorbildgetreu bedient werden und die Anzeigeinstrumente zeigen realistische Werte an. Das Fahrgefühl wird durch die Sicht aus dem Frontfenster auf das Bahntrasse vermittelt, wobei in Abhängigkeit von der Geschwindigkeit Oberleitungsmasten an der Lok vorbeiziehen. Verschiedene Parameter können in gewissen Grenzen frei gesetzt werden, wie... • Abbremsung (Qualität der Luftdruckbremsanlage) • Wagen-Gewicht (Gewicht eines einzelnen Wagens) • Wagen-Anzahl (Zuglänge) • Witterungsverhältnis (Adhäsion) • Befahrene Kurvenradien • Gefälle oder Steigung Mit dem fingierten Zug durchfährt man ein Fahrszenario, das zuvor vom Lokomotiv-Fahrsimulator als ASCII-File ab Disk gelesen wird. In diesem Fahrszenario ist ein bestimmtes Stück Bahnlinie mit Vor- und Hauptsignalen, Kurven und Steigungen beschrieben, das Stück für Stück abgefahren wird. Wie funktioniert's? Der Lokomotiv-Fahrsimulator besteht aus 6 Anlagen... 1. MMI : Setzt eine Tastatureingabe in den entsprechenden Fahr- oder Bremsbefehl um. 2. Elektromotoren : Die Lokomotive greift über einen riesigen Drehschalter oder Stufenschalter verschiedene Fahrspannungen am Transformator ab und gibt sie auf die Elektro motoren. Ist die Lok abgeschaltet liegt der Drehschalter in Mittelstellung. Soll nun beschleunigt werden, muss der Drehschalter Schaltkontakt für Schaltkontakt im Uhrzeigersinn aufdrehen. Dabei darf kein Schaltkontakt übersprungen werden. Bewegt sich der Drehschalter aus der Nullstellung im Gegenuhrzeigersinn, wird den Elektromotoren nicht Strom zugeführt sondern entzogen (Rekuperieren). Dies hat eine Bremswirkung zur Folge und ist neben der Druckluftbremse das zweite Bremssystem an Bord. Zur Berechnung von Zugkraft in Funktion der Geschwindigkeit resp. Motorstrom in Funktion der Zugkraft dient eine Kurvenschar, die die Fahrmotoren im Normalbetrieb und beim Rekuperieren beschreibt. 3. Stufenschalter : Der Stufenschalter hat auf die 9 Stellungen des Fahrschalthebels folgendermassen zu reagieren: F++ +3 Stufen/sec bis I=2150A, dann +1 Stufe/sec bis I=3100A F+ +3 Stufen/sec bis I=2150A, dann +1 Stufe/sec bis I=2400A M +1 Stufe/sec bis I=2400A F• Stufe unverändert F- Falls Stufe >0: -1 Stufe/sec bis I=2150A, dann -3 Stufen/sec bis Stufe=0 0 Stufe=0 B- Falls Stufe <0: +1 Stufe/sec bis I=-1750A, dann +3 Stufen/sec bis Stufe=0 B• Stufe unverändert B+ -3 Stufen/sec bis I=-1750A, dann -1 Stufe/sec bis I=-2250 A Anmerkung Fahren : Stufe +l bis +32 Rekuperieren: Stufe -1 bis -22 4. Bremsapparat : Aufgrund einer Absenkung des Haupleitungsdruckes, als Ursache einer Bremshebelbetätigung, wird ein Bremszylinderdruck aufgebaut der über Bremsbacken eine Bremskraft am Rad verursacht. 5. Supervisor : Überwacht die Zugsfahrt in bezug auf das Fahrszenario, berechnet die Fahrwiderstände wie... • Laufwiderstand • Bogenwiderstand bei Kurvenfahrt • Neigungswiderstand bei Steigung oder Gefälle • Beschleunigungswiderstand Prüft zudem, ob die Zugkraft auf die Schiene gebracht werden kann und veranlasst den Stufenschalter auch bei Fehlmanipulationen richtig zu arbeiten. 6. Performer : Updaten der Anzeigeinstrumente. Erzeugt bewegte Graphik resp. den Fahreffekt (Sicht aus dem Frontfenster der Lokomotive) (Printscreen des Simulationsprogramms)
(Berechnungsgrundlagen) (Programmablauf)
1. Software-Produktbild SWP
1.1 Einleitung
Um was geht es?
Trotz dem heutigen hohen Technisierungsgrad werden die Triebfahrzeuge der Eisenbahnen noch immer von Menschen, den Lokomotivführer:innen, geführt. Dass solche Leute gründlich ausgebildet werden müssen, versteht sich von selbst. Unerlässliches Hilfsmittel ist da der Fahrsimulator, der es ermöglicht, unabhängig von einem Fahrzeug in einer fiktiven Umgebung diverse Fahrszenarien durchzuspielen. Solche Lernfahrten als «Trockenübungen», haben den Vorteil, dass sie weder Mensch noch Maschine gefährden, noch den Diensbetrieb stören und zu guter Letzt weniger Energie benötigen als eine Fahrt auf einem richtigen Fahrzeug. Schlussendlich ist da auch noch der Vorteil einer präzisen Fahrauswertung die Aufschluss über den Ausbildungsstand des Lokführers geben kann. Das Fahrzeug resp. die Lokomotive die simuliert werden soll, muss mit einer geeigneten Apparatur modelliert werden. Das heisst, dass die physikalischen Zusammenhänge aus der Kinematik, Pneumatik und Elektrotechnik wirklichkeitsgetreu nachgebildet werden sollen. Diese Apparaturen sollen seinerseits auch auf Ereignisse reagieren, die vom Bedienenden über möglichst realitätsnahe Führerstandsarmaturen eingegeben werden können. Letztendlich soll die Aussenwelt, von der gewisse Handlungen ja abhängig sind, geeignet dargestellt werden.
Zweck → Was soll erreicht werden?
- Elektrisches Fahren, elektrisches und pneumatisches Bremse möglichst real auf einem Computer nachbilden
- Aus der Sicht des Lokführers die wichtigsten Führerstandsmessgeräte inkl. Sicht aus der Frontscheibe auf einem Bildschirm anzeigen
- Auf demselben Bildschirm virtuell die wichtigsten Signalbefehle anzeigen (Vorsignal/Hauptsignal)
- Die wichtigsten Führerstandsarmaturen zu implementieren
1.2 Erläuterungen zum triebfahrzeugseitigen Bahnbetrieb
Die Eisenbahn beruht auf dem physikalischen Effekt, den wir Reibung nennen. Gäbe es keine Reibung würden die Räder auf der Schiene durchdrehen und der Zug bliebe stehen oder falls bereits in Bewegung, könnte ihn nur der Luftwiderstand zum stehen bringen. (vgl. Schlittschuhläufer auf dem Eisfeld) Der Reibungskoeffizient ist eine spezifische Konstante, die Normalkomponente einer Gewichtskraft und Reibungskraft in Zusammenhang bringt. Der Reibungskoeffizient und die Normalkraft des Triebfahrzeuges sind also die entschei denden Komponenten, die eine Aussage darüber geben, wieviel Motorenkraft über haupt maximal in Zugkraft umgesetzt werden können. Die Normalkraft des Triebfahrzeug in der Ebene ist in guter Näherung proportional zur Fahrzeugmasse. Der Reibungskoeffizient jedoch hängt einerseits stark von der Witterung ab (Schönwetter : u=0.4 ; Schlechtwetter : u=0.1) und andernseits von der Fahrgeschwindigkeit des Zuges. Das Triebfahrzeug (Lokomotive) setzt Energie in Zugkraft um. Bei elektrischem Betrieb geschieht dies durch Elektromotoren. Ebenfalls kann Zugkraft (oder besser Stosskraft) mittels denselbigen Motoren bei modernen Lokomotiven in Energie zurückgewandelt werden. (Rekuperation) Die Bremskraft hingegen wird nicht allein von der Lokomotive, sondern vom ganzen Zug «produziert». (Siehe Druckluftbremsen, Bremsbacken) Im folgenden werden die einzelnen Komponenten betrachtet.
Der elektrische Antrieb (Fahrbetrieb)
Es handelt sich hier um eine Lokomotive mit elektrischer Motorisierung. Je nach angelegter Motorenspannung ändert sich der Motorenstrom, das Drehmoment der Motorachse und schliesslich die Zugkraft.
- Der Fahrstufenschalter:
Damit die Zugkraft und letztlich die Geschwindigkeit beeinflusst werden kann, muss die Motorenspannung über einen gewissen Bereich eingestellt werden können. Dies geschieht über eine Stufenschalter, der verschiedene Spannungen an einem Spartransformator abgreift. Der Fahrstufenschalter hat zwei Geschwindigkeiten, mit denen er Fahrstufen auf- oder abschalten kann. - Die Motorentrennschützen (Trennhüpfer):
In den Fahrmotoren fliessen Ströme im kA-Bereich. Sollten diese ausgeschaltet werden, geschieht dies über die Trennhüpfer. Die verhindern unter Zuhilfenahme von Druckluftdüsen die Entstehung eines Lichtbogens. Die Motorentrennhüpfer werden immer dann beansprucht, wenn sofort die Motoren vom Netz getrennt werden müssen, also nicht im regulären Betriebsfall.
Der elektrische Bremsbetrieb
Die Fahrmotoren können bei einer Talfahrt oder bei einer Verzögerungsfahrt als Generatoren geschaltet werden. Die Motoren bewirken dabei eine bestimmte Bremskraft, die vom produzierten Generatorstrom abhängig ist. Bei modernen Lokomotiven kann dieser Strom ins Netz zurückgespiesen werden. Man spricht dann von einer Rekuperationsbremse. Ältere Lokomotiven verheizen diesen Strom in Leistungswiderständen, die zur besseren Kühlung meist auf dem Dach montiert sind.
- Das Bremsauslösepedal:
Wird der Zug mit der elektrische Bremse und der automatischen Druckluftbremse verzögert, kann das für das Triebfahrzeug schlechte Auswirkungen haben: Bedingt durch die doppelte Bremswirkung (Luft und elektrisch) wird die Lokomotive Überbremst oder Festgebremst. Das heisst, dass die Bremskraft nicht auf die Schiene kommt und die Räder zu gleiten beginnen. Dies wiederum hat Flachstellen am Radumfang zur Folge was die Laufruhe beeinträchtigt. Um dies zu verhindern, wird beim kombinierten Bremsen mit dem Bremsauslösepedal die Druckluftbremse am Fahrzeug ausgeschaltet. Sollte dieses Pedal beim Bremsen einmal vergessen werden, schaltet ein Sicherheitskreis die elektrisch bremsenden Motoren automatisch ab.
Der Druckluft-Bremsbetrieb
Man unterscheidet zwischen direkt wirkenden Druckluftbremsen (Rangierbremse) und indirekt wirkenden Druckluftbremsen (Automatische Zugbremse). Das Grundprinzip ist aber bei beiden dasselbe: Mit verdichteter Luft werden mittels Bremszylinder die Bremsklötze an die Bandagen der Räder gedrückt. Dies bewirkt eine Bremskraft, die aber stark vom Reibungskoeffizient Bremsklotz-Rad und dann Rad-Schiene abhängig ist. Die Aerodynamik, der das Bremsen unterworfen ist, hat auch eine gewissen Trägheit, die dafür Verantwortlich ist, das nach Betätigen des Bremshebels im Führerstand nicht sofort jeder Bremsklotz satt am Rad anliegt um den Bremsvorgang zu unterstützen. (Durchschlagzeit)
- Die automatische Bremse:
Bremse die über die Hauptleitung entlang des Zuges auf alle Wagen inkl. des Triebfahrzeuges wirkt. Auch selbsttätige Bremse genannt. Es werden 3 Bremsarten unterschieden:- P-Bremse → Rasch wirkende Personenzugbremse. Bremszylinderfüllzeit ca. 3..5 sec. Lösezeit ca. 10..20 sec.
- R-Bremse → Verstärkte Bremse für Züge mit höheren Geschwindigkeit. Über 80 km/h (Bei Triebfahrzeugen über 60 km/h) wird der Bremsklotzdruck erhöht. Dies weil der Haftreibwert bei grösseren Geschwindigkeit kleiner wird. Unter 50 km/h wird der Bremsklotzdruck wieder auf einen normale Wert ermässigt.
- G-Bremse → langsam wirkende Güterzugbremse. Bremszylinderfüllzeit ca. 18..35 sec. Lösezeit ca. 45..60 sec.
- Die Rangierbremse:
Dies ist eine direkt, ausschliesslich auf das Triebfahrzeug wirkende Druckluftbremse, ähnlich der P-Bremse (Niederdruckstufe). Mit dem Rangierbremshebel wird ein Ventil betätigt, dass direkt vom Hauptluftbehälter über Druckübersetzer Luft in die Bremszylinder füllt. - Die Drucklufterzeugung für die Bremsen:
Der Kompressor des Triebfahrzeuges presst Druckluft in den Hauptluftbehälter bis zu einem Ueberdruck von ca. 10 Atm. Vom Hauptluftbehälter gelangt die Druckluft zum Führerbremsventil (Bremshebel) der automatischen Bremse oder zu dem Rangierbremsventil (Bremshebel) der Rangierbremse. - Die Wirkungsweise der automatischen Druckluftbremsen:
Bei der automatische Bremse strömt die Druckluft vom Führerbremsventil in die Hauptleitung (entlang des Zuges) und in die Hilfsluftbehälter der einzelnen Wagen. Die Bremse ist betriebsbereit, wenn die Hauptleitung und die Hilfsluftbehälter auf 5 Atm. aufgeladen sind. Zum Bremsen wird der Druck vom Führerbremsventil her in der Hauptleitung abgesenkt wodurch die Steuerventile der einzelnen Wagen in die Bremsstellung wechseln und somit Druckluft von den Hilfsluftbehälter in die Bremszylinder strömen kann. Man beachte, dass den Bremszylinder die Druckluft nicht direkt von der Lokomotive her, sondern über die Hilfsluftbehälter der jeweiligen Wagen zugeführt wird. Zum Lösen der Bremse muss der Druck in der Hauptleitung erhöht werden, worauf die Hilfsluftbehälter vom Bremszylinder abgehängt und erneut auf 5 Atm. aufgeladen werden. Die Druckluft in den Bremszylinder strömt dabei ins Freie und hebt die Wirkung der Bremse auf. - Was bedeutet «Durchschlaggeschwindigkeit»?:
Mit der Durchschlaggeschwindigkeit bezeichnet man die Geschwindigkeit, mit der sich die eingeleitete Bremsung fortpflanzt (300m/sec.) Bei langen Zügen können einige Sekunden verstreichen, bis die hinterste Bremse anspricht.
Schleuder- und Gleitschutz
Der Schleuderschutz hat die Aufgabe, das Schleudern eines Triebradsatzes bei ungenügender Haftreibung festzustellen und Gegenmassnahmen einzuleiten, wie zB. Anfahrvorgang anhalten (Stufenschalter) oder Reduktion der Zugkraft usw.
Betriebsstörungen
Triebfahrzeugseitig können diverse Betriebsstörungen auftreten. Es lassen sich jedoch keine vom Führerstand aus beheben. Dazu muss im Maschinenraum am entsprechenden Apparateblock ein Eingriff vorgenommen werden. Störungen wären:
- Störung am Stromabnehmer. An Apparatentafel auf zweiten Stromabnehmer umschalten.
- Störung in den Hauptstromkreisen. Im Maschinenraum Stufenschalter Trennhüpfer und Bremsumschalter überprüfen und falls möglich von Hand Eingriff vornehmen.
- Störung im Primärstromkreis. Lokomotive muss abgeschleppt werden.
- Störung am Leistungstransformator. (Brand/Oelaustritt) Lokomotive muss abgeschleppt werden.
- Störungen an der Fahrmotorventilation. Lokomotive muss abgeschleppt werden.
- Störungen durch Fehlbedienung vorgesehen, wie zum Beispiel: Nichtbetätigung des Bremsauslöseschalters beim elektrischen Bremsen bewirkt ein Oeffnen der Trennhüpfer bzw. Abschalten des Fahrstromes.
- Ein neuer Betriebsparameter eingeführt: Gefälle/Ebene/Steigung
Die Sicherheitssteuerungen des Triebfahrzeuges
Um Unfälle zu vermeiden, sind diverse Sicherheitssysteme eingebaut:
- Die Wachsamkeitskontrolle (Totmannpedal):
Unter dem Führerstand befindet sich ein Fussschalter. Dieser oder die anderen Armaturen wie Bremshebel oder Fahrschalter müssen sporadisch (je nach zurückgelegtem Weg) betätigt werden. Ist dies nicht der Fall, muss davon ausgegangen werden, dass dem Lokführer etwas zugestossen ist. Darauf wird eine Schnellbremsung und Abschaltung eingeleitet. - Die Zugsicherung:
Überfahrene, geschlossene Vorsignale müssen als "Erkannt" quittiert werden. Ansonsten wird ebenfalls eine Schnellbremsung und Abschaltung eingeleitet.
1.3 Erläuterungen zum fahrdienstseitigen Bahnbetrieb
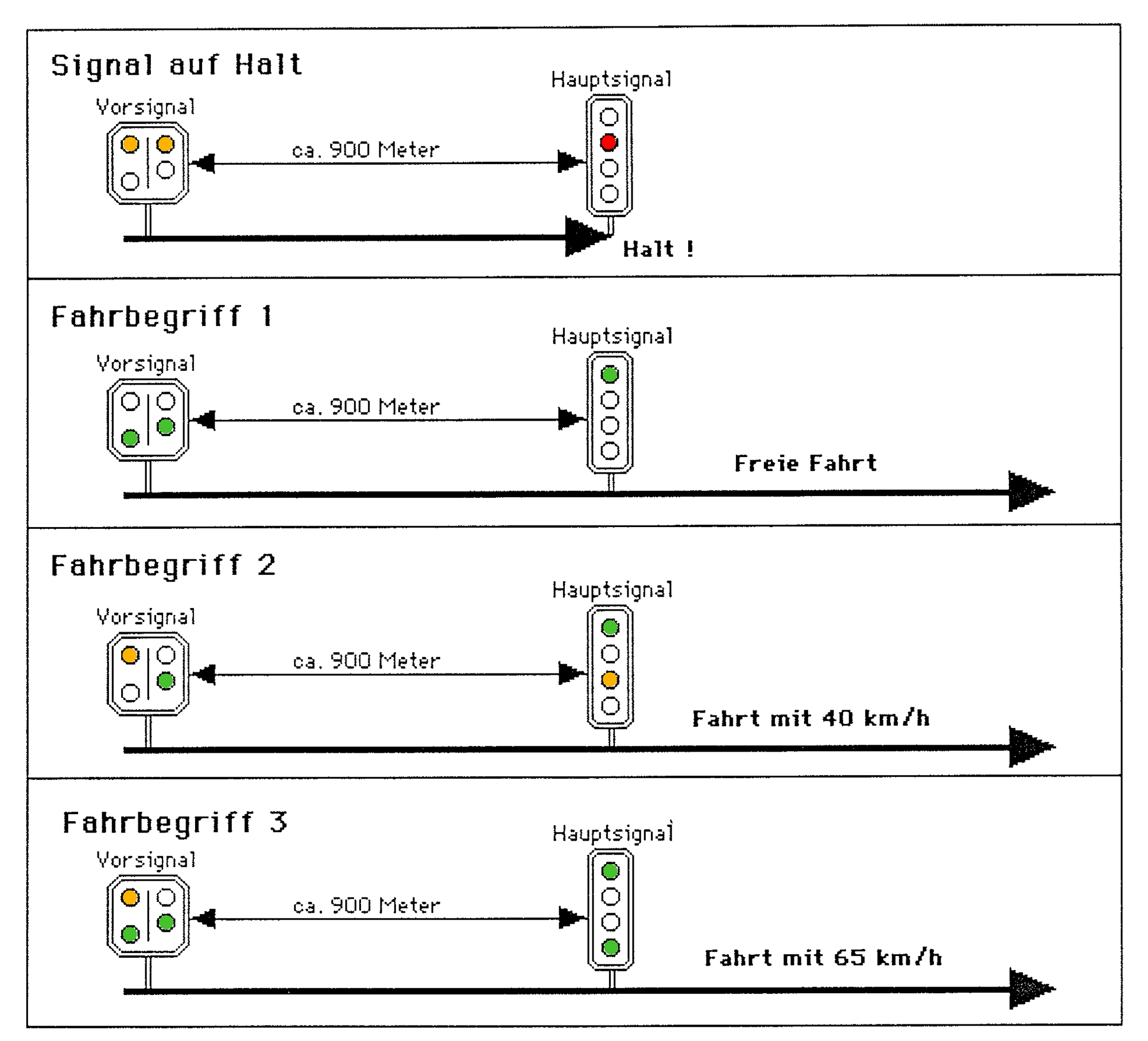
Die Vor- und Hauptsignale
Es gibt zwei Arten von Lichtsignalen:
- Das Vorsignal:
Das Vorsignal lässt erkennen, welches Signalbild am nachfolgenden Hauptsignal zu erwarten ist. Es steht in der Regel in Bremswegentfernung vor dem Hauptsignal. (Richtwert : 900 Meter vor dem Hauptsignal)
Das Vorsignal kann folgendes signalisieren:- Warnung → Das folgende Hauptsignal ist geschlossen. (Zwei orange Lichter nebeneinander)
- Fahrbegriff 1 → Freie Fahrt mit der im Dienstfahrplan vorgeschriebener Höchstgeschwindigkeit. (Zwei grüne Lichter schräg übereinander)
- Fahrbegriff 2 → Fahrt mit 40 km/h (Ein oranges und ein grünes Licht schräg übereinander)
- Fahrbegriff 3 → Fahrt mit 65 km/h für Züge der Reihe R (Zwei grüne Lichter schräg übereinander und ein oranges Licht oben links)
- Das Hauptsignal:
Hauptsignale zeigen an, ob ein nachfolgender Gleisabschnitt von einem Zug befahren werden darf oder nicht. Zudem lassen sie erkennen, mit welcher Geschwindigkeit die folgende Strecke befahren werden soll.
Das Hauptsignal kann folgendes signalisieren:- Halt → (Ein rotes Licht) Das zugehörige Vorsignal zeigt Warnung.
- Fahrbegriff 1 → Freie Fahrt mit der im Dienstfahrplan vorgeschriebener Höchstgeschwindigkeit. (Ein grünes Licht)
- Fahrbegriff 2 → Fahrt mit 40 km/h (Ein oranges unter einem grünen Licht)
- Fahrbegriff 3 → Fahrt mit 65 km/h für Züge der Reihe R (Zwei grüne Lichter übereinander)
1.4 Die Bogenfahrt
Fahrtechnisch bedeutet eine Kurvenfahrt einen etwas grösseren Fahrwiderstand und eine kleinere Maximalgeschwindigkeit. Diese kann mit einer Geschwindigkeitstafel angezeigt werden.
1.5 Neigung des befahrenen Streckenabschnittes
Die Neigung des Bahntrasses bietet einige Effekte wie zB.:
- Zurückrollen des Zuges in der Steigung bei gelösten Bremsen und abgeschalteten Fahrmotoren: Erhöhte Schwierigkeit beim Anfahren nach einem Signalhalt.
- Grössere Bremskraft, die bei einer Talfahrt für einen Zielhalt aufgewendet werden muss, als bei der Fahrt in der Ebene.
- Schlechtere Beschleunigung in der Steigung wegen der Hangabtriebskraft.
Gefahr vom Gleiten in der Beschleunigungsphase wegen der ungewohnt hohen Belastung. (Gotthard: Steigung max. 27 Promille)
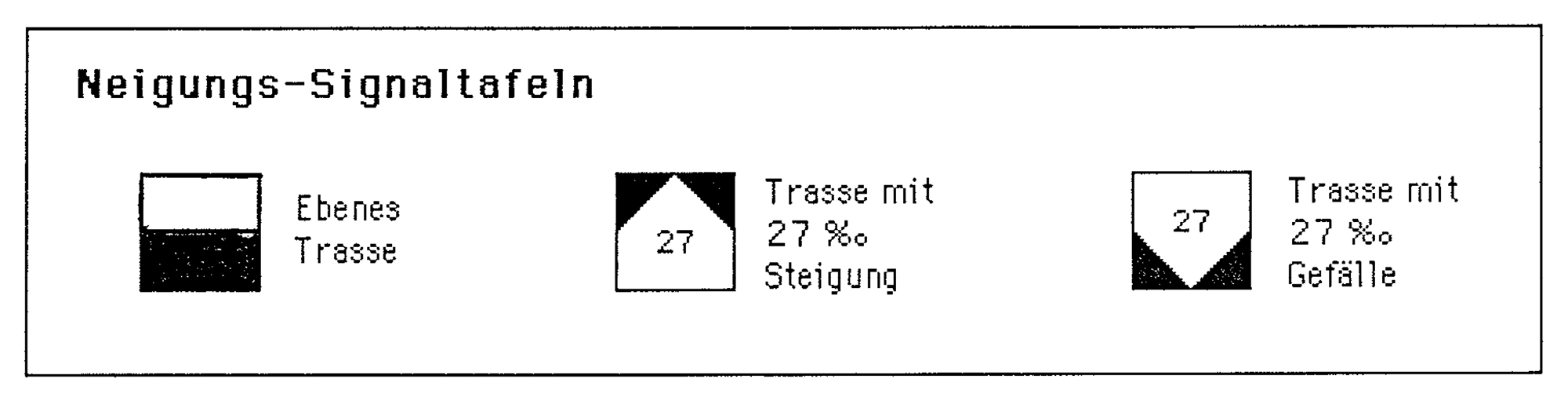
Da die durchschnittliche Trasseneigung von Auge relativ schlecht zu erkennen ist, wird sie mit speziellen Signaltafeln angezeigt:- Steigung Tafel mit symbolischem Haus mit Schrägdach, spitz oben Darin mit grossen Ziffern angegeben die Steigung in Promille und die Entfernung zur nächsten Tafel.
- Gefälle Tafel mit symbolischem Haus mit Schrägdach, spitz nach unten. Darin mit grossen Ziffern angegeben das Gefälle in Promille und die Entfernung zur nächsten Tafel.
- Ebene Tafel mit waagrechtem Strich in der Mitte. Darin mit grossen Ziffern angegeben die Entfernung zur nächsten Tafel.
1.6 Literaturverzeichnis und Ansprechpartner
Bahntechnische Fachliteratur
- SBB, R430.2 «Reglement über die el. Lokomotiven Re 6/6 11601-11689»
- BBC, Druckschrift Nr. CH-B 0510 D «Die Bo'Bo'Bo-Lokomotive Serie Re 6/6 der SBB»
- MFO, Bulletin 0erlikon 364 365 «Sonderheft: Automation auf elektrischen Triebfahrzeugen»
- SBB, R450.2 Bd I u. II «Bauarten und Bestandteile der Druckluftbremsen» «Technisches Bremsreglement»
- Z. Filipovic, Springer-Verlag «Elektrische Bahnen»
- Oerlikon-Knorr Eisenbahntechnik AG, Diverse Unterlagen
- SBB, R312.l «Reglement über die Signale»
Informatik-Fachliteratur
- SYBEX «Das Turbo Pascal 5.0 Buch»
- Markt&Technik «Grafik mit Turbo Pascal»
Fachliche Bezugspersonen und Ansprechpartner
Besonderen Dank gilt nachstehenden Personen für Ihre fachliche Unterstützung in besonderen Fragen:
- D. Frauenfelder in Henggart, SBB-Lokomotivführer
- H. Brechtbühl, Ingenieur 0erlikon-Knorr Eisenbahntechnik AG
- R. Graf & Hr. Wenk, Ingenieure ABB-Verkehrssysteme/Vollbahnen in 0erlikon
- Hr. Rochard, SBB-0berlokomotivführer Zugförderungsdienst Zürich
2. Software-Anforderungsspezifikation SAS
2.1 Simulierter Lokomotivtyp → SBB Re 6/6
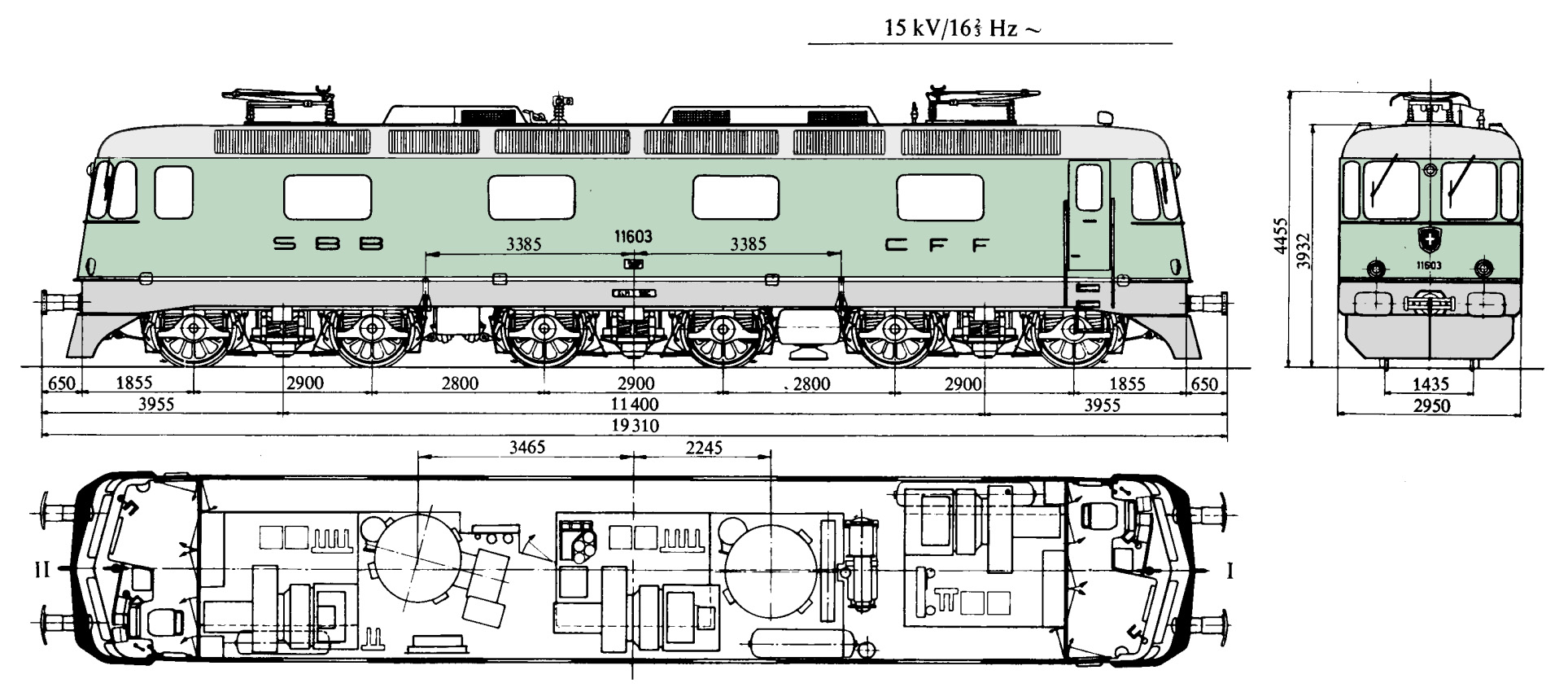
Bei der Lokomotive, die nachgebildet werden soll, handelt es sich um die seit Juli 1975 bei den SBB verkehrenden Streckenlokomotive des Typs Re 6/6. Diese sechsachsige Hochleistungslokomotive wird für die Zugförderung auf den Alpentransversalen (Gotthard/Simplon) eingesetzt. Sie ist die derzeit (1990) stärkste Lokomotive auf Schweizer Schienen und entwickelt eine maximale Leistung von 8020 kW bei 106 km/h (= 10'900PS), oder anders ausgedrückt, sie vermag auf einer Steigung von 27 Promille eine Last von 800 Tonnen mit 0.03 m/s2 vom Stillstand auf 80 km/h zu beschleunigen.
Technische Zeichnung der Lokomotive Re6/6
 Für die Simulation wurde diese Lokomotive ausgewählt, weil sie sich in der Bedienung kaum vom Standard- oder Schulfahrzeug (Re 4/4) der SBB unterscheidet,
aber etwas interessantere Leistungsdaten aufweisen kann, als ihre kleine Schwester.
Für die Simulation wurde diese Lokomotive ausgewählt, weil sie sich in der Bedienung kaum vom Standard- oder Schulfahrzeug (Re 4/4) der SBB unterscheidet,
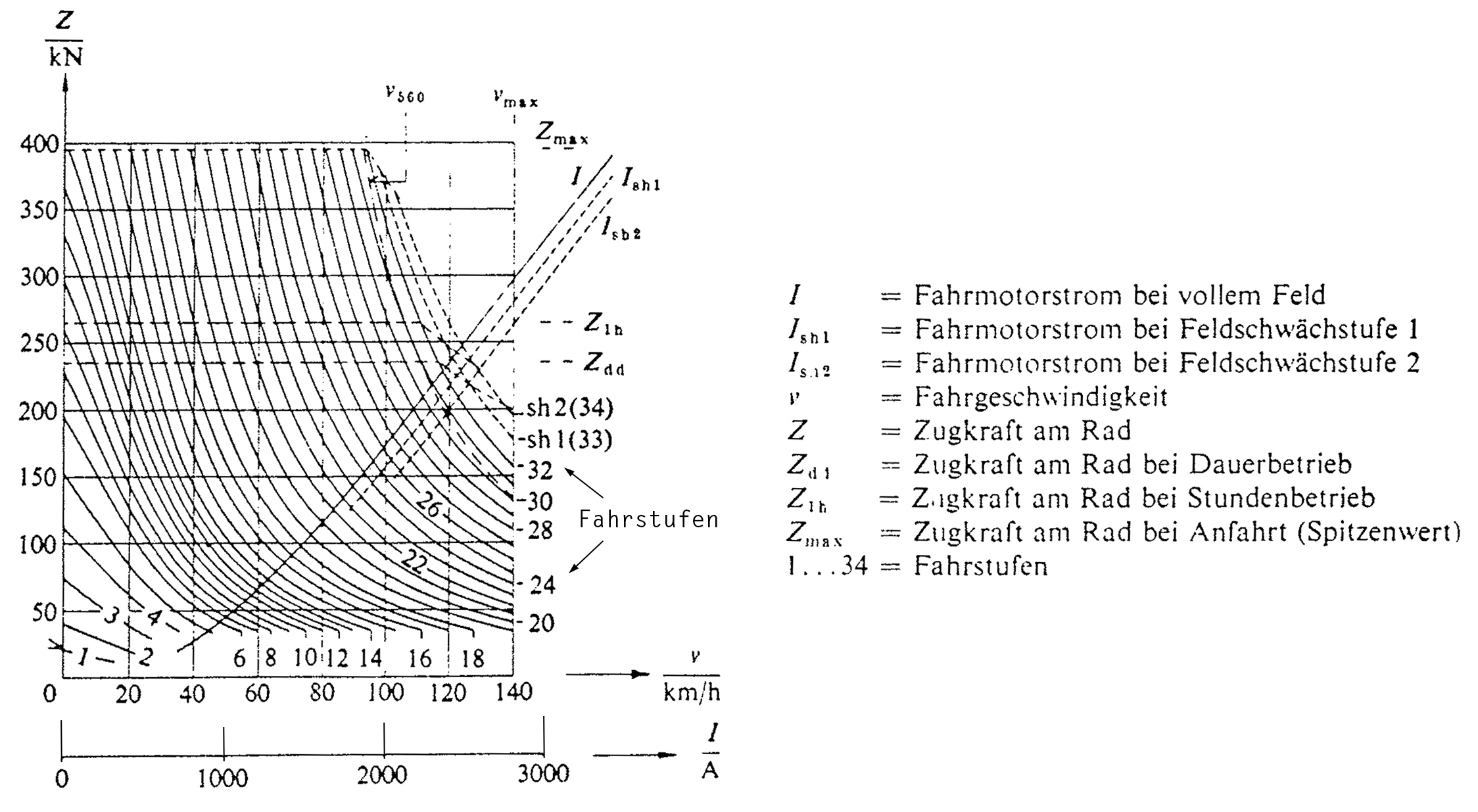
aber etwas interessantere Leistungsdaten aufweisen kann, als ihre kleine Schwester.Bei der Re 6/6 handelt es sich um eine Lokomotive mit der Achsfolge Bo'Bo'Bo (=drei Zweiachsendrehgestelle mit Einzelradantrieb) für Betrieb an Einphasen-Wechselspannung (15 kV bei 16 2/3 Hz) in Direktmotortechnik. 6 mal 12-poliger Einphasen-Wechselstrom-ReihenschlussFahrmotor mit Umax= 620 V/ Imax = 3440kA. Zur Steuerung der Fahrmotoren dient ein Stufenschalter mit 34 Positionen. Position 33 und 34 sind ausschliesslich für den Feldschwächebetrieb reserviert. Unter Feldschwächebetrieb versteht man die Schwächung der Motorerregung, was eine erhöhte Drehzahl und ein erhöhter Strom bei gleichbleibendem Drehmoment bewirkt. Der Feldschwächebetrieb wird in dieser Simulation nicht implementiert, darum stehen nur 32 relevante Fahrstufen zur Verfügung. Das Fahrstufen/Zugkraft/Strom/Geschwindigkeits-Diagramm für elektrisches Fahren wie auch rekuperatives Bremsen entnehme man den folgenden Kennlinien:
Fahr-Kennlinien der Lokomotive Re6/6 bei 15 kV Netzspannung
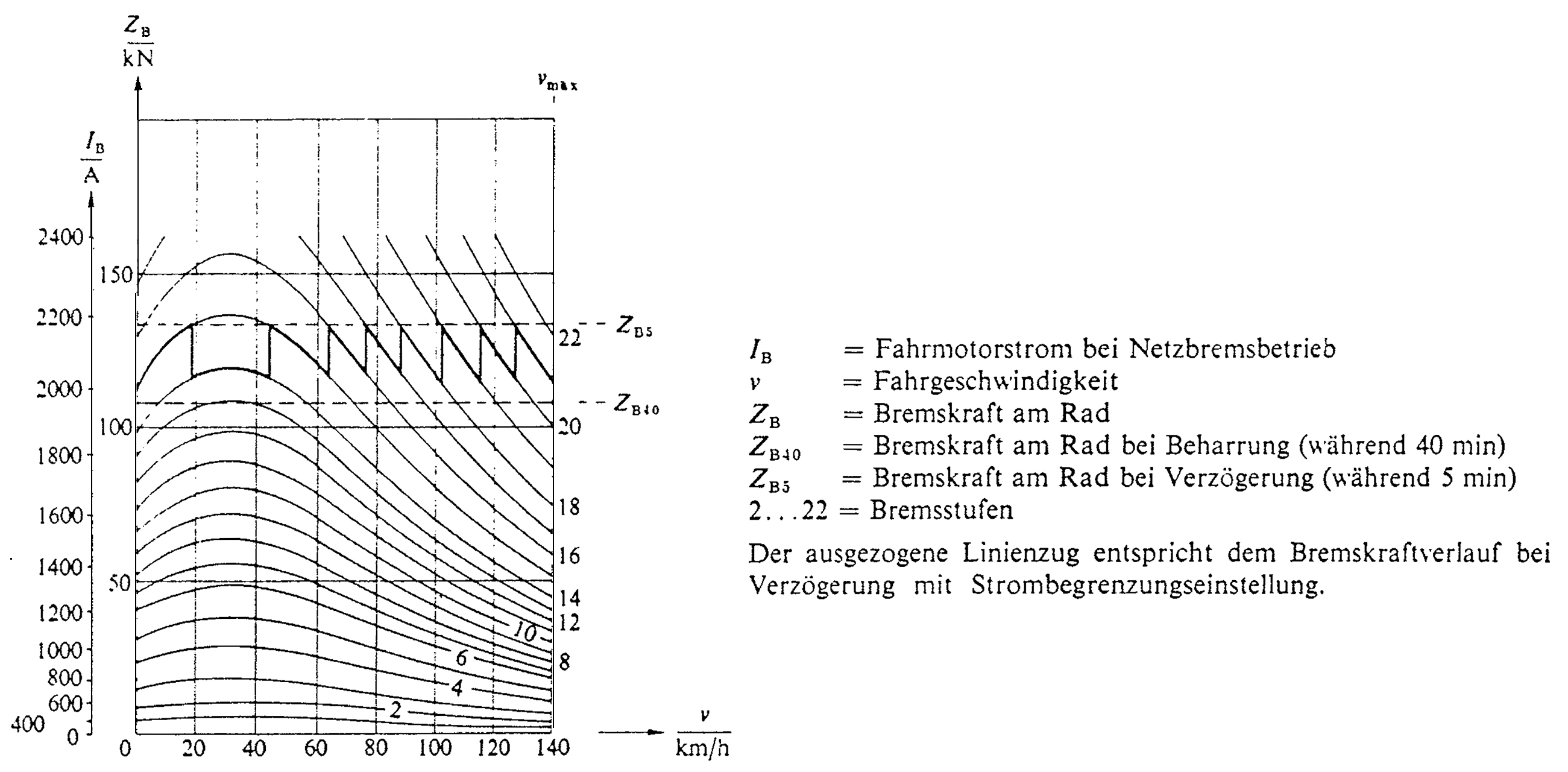
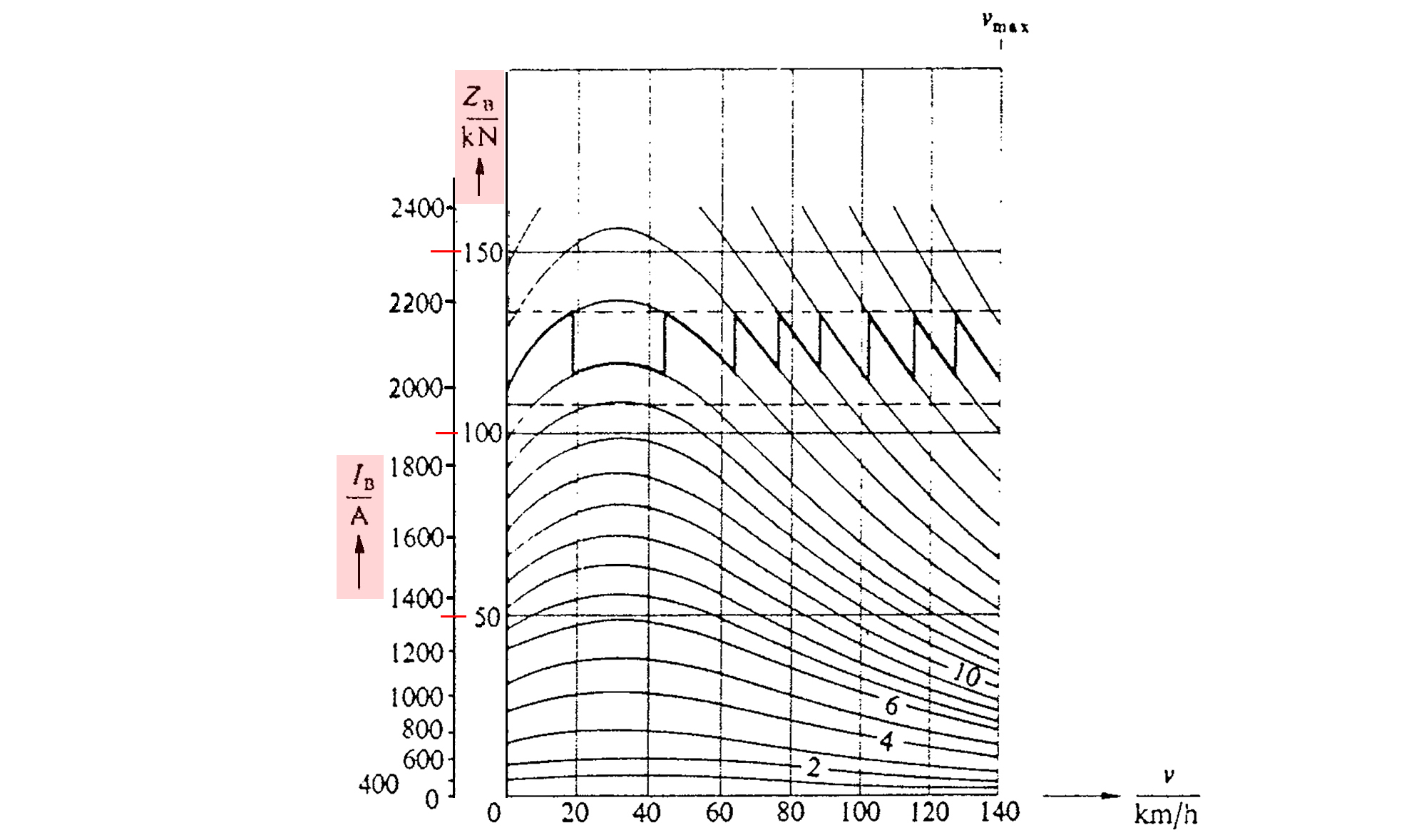
Motorbrems-Kennlinien der Lokomotive Re6/6 bei 15 kV Netzspannung
 Weitere Parameter:
Weitere Parameter:
- Länge über Puffer= 19.31 Meter
- Masse = 120 Tonnen
2.2 Simulierte Anhängelast
Die Lokomotive soll als Lokzug (Zug mit Lokomotive und in unserem Fall ein Wagen) oder als Blockzug
mit einer Anhängelast von zB. 16 Leichtstahl-Personenzugwagen verkehren.
 Für die Wagen sollen folgende Parameter gelten:
Für die Wagen sollen folgende Parameter gelten:
- Länge über Puffer: 25 Meter
- Masse (Beladen): 30 Tonnen
- Bremstyp: R-Bremse
- Achsanzahl pro Wagen: 4
2.3 Ausgangslage bei Simulationsbeginn (Randbedingungen)
Bei Fahrbeginn mit der simulierten Lokomotive ist folgende Ausgangslage anzutreffen:
- Der ganze Zug straff aneinandergekuppelt, so dass Längsschwingungen in der Bremsphase vernachlässigt werden können.
- Elektrische Leitungen und Druckluftleitungen entlang des ganzen Zuges sind ordnungsgemäss angeschlossen.
- Kein Druckabfall entlang der Hauptleitung infolge Leckstellen.
- An der Lokomotive: Hauptluftbehälter geöffnet und Steuerapparatur eingeschaltet.
- Stromabnehmer am Fahrdraht anliegend und Hauptschalter eingeschaltet.
- Umgeschaltet auf R-Bremse. (Voraussetzung: Alle Wagen sind mit R-Bremse ausgestattet)
- An den Personenwagen sind alle Türen verriegelt.
- Handbremsen sind alle gelöst.
- Hauptlufttank und Hilfslufttanks am ganzen Zug gefüllt (Es wird während der ganzen Fahrt und vor allem nach Bremsmanöver vorausgesetzt, dass der Kompressor den Hauptlufttank resp. die Hilfslufttanks genügend schnell mit einer ausreichenden Menge Druckluft 10 Atm. (resp. Hauptleitung 5 Atm.) versorgt. Der Auf- und Abbau des Bremszylinderdrucks beim Bremsen wird jedoch rechnerisch nachvollzogen.
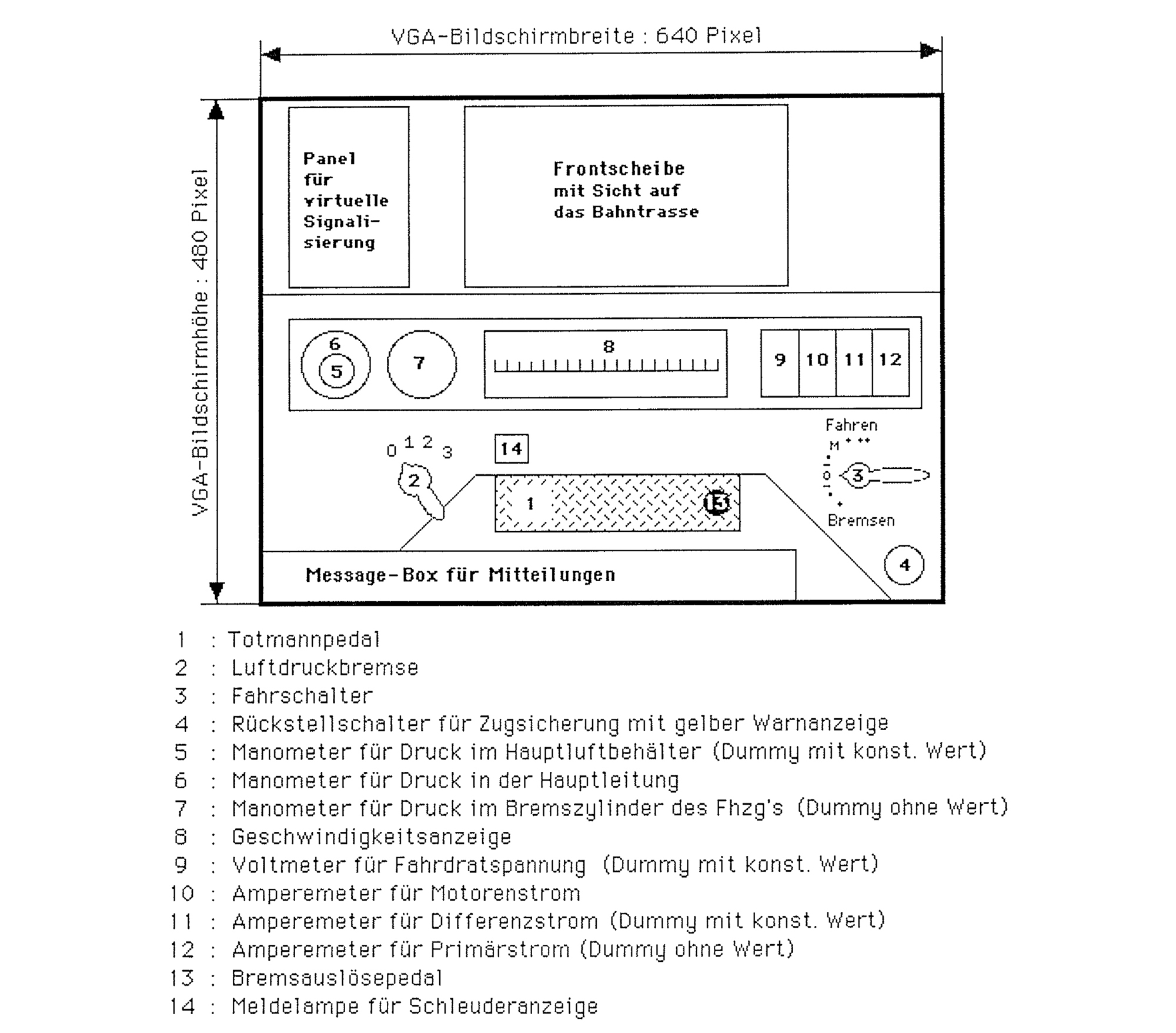
2.4 Man-Machine-Interface (MMI)
Das MMI besteht hauptsächlich aus den Führerstandsarmaturen der Re 6/6. Es wird unterschieden zwischen Eingabe- und Ausgabeeinheit.
Eingabeeinheit
Im folgenden eine Übersicht über betriebsrelevante, lokomotivseitige Eingabeelemente. Diese Eingabeelemente bzw. deren Position/Stellungen werden in die Simulation resp. Berechnung miteinbezogen:
- Fahrschalter [l..9]
- Druckluftbremshebel (Automatische Bremse) (0..9]
- Rückstellschalter für Zugsicherung [On/Off]
- Bremsauslösepedal [On/Off]
- Totmannpedal [On/Off]
- Fahrschalter:
Der Fahrschalter besteht aus 9 Stellungen:- Fahren++ → Aufschalten von 3 Stufen/sec. bis zum Stundenstrom Ih= 2150 Ampere dann weiteres Aufschalten von 1 Stufe/sec. bis zum Zuschaltstrom I++ = 3100 Ampere. Danach Ausregelung des Zuschaltstroms I++ durch Zu- oder Wegschalten einer Stufe. (Lastabhängig)
- Fahren+ → Aufschalten von 3 Stufen/sec. bis zum Stundenstrom Ih= 2150 Ampere dann weiteres Aufschalten von 1 Stufe/sec. bis zum Zuschaltstrom I+ = 2400 Ampere. Danach Ausregelung des Zuschaltstroms I+ durch Zu- oder Wegschalten einer Stufe. (Lastabhängig)
- FahrenM → Aufschalten von 1 Stufe/sec. bis zum Zuschaltstrom
I+ = 2400 Ampere. Danach Ausregelung des Zuschaltstroms.
I+ durch Zu- oder Wegschalten einer Stufe. (Lastabhängig) - Fahren• → Der Stufenschalter bleibt auf der zuletzt angesteuerten Fahrstufe stehen.
- Fahren- → Sofern Stufenschalter nicht auf Stufe 0 aber auf einer Fahrstufe → Zurückschalten mit 1 Stufe/sec. bis zum Stundenstrom Ih = 2150 Ampere, dann weiteres Zurückschalten mit 3 Stufen/sec. bis auf Null.
- Position0 → Öffnen der Trennhüpfer, dh. Motoren elektrisch von der Fahrspannung trennen und zurückschalten des Stufenschalters mit 3 Stufen/sec. bis auf Null.
- Bremsen- → Sofern Stufenschalter nicht auf Stufe 0 aber auf einer Bremsstufe → Zurückschalten mit l Stufe/sec. bis zum Stundenstrom Ih = 1750 Ampere, dann weiteres Zurückschalten mit 3 Stufen/sec. bis auf Null.
- Bremsen• → Der Stufenschalter bleibt auf der zuletzt angesteuerten Bremsstufe stehen.
- Bremsen+ →Aufschalten von 3 Stufen/sec. bis zum Stundenstrom Ih = 1750 Ampere, dann weiteres Aufschalten von l Stufe/sec. bis zum Rekuperationsstrom Ir= 2250 Ampere. Danach Ausreglung des Rekuperationsstroms Ir durch Zu- oder Wegschalten einer Stufe. (Lastabhängig)
- Druckluftbremshebel (Automatische Zugsbremse):
Der Bremshebel ist in Wirklichkeit ein Ventilhebel, der stufenloses Bremsen zulässt. Da diese Nachbildung mit einem Computer ohne A/D-Wandlerkarte nicht möglich ist, werden neun relevante Bremshebelstellungen definiert.
Z.B. Bremsstufe 1 → 0.1667 Bar Druckablass (Hauptleitungsdruck von 5 Bar auf 4.83 Bar bedeutet leichtes Anbremsen.
Z.B. Bremsstufe 5 → 0.8333 Bar Druckablass (Hauptleitungsdruck von 5 Bar auf 4.17 Bar bedeutet stärkeres Abbremsen.
Z.B. Bremsstufe 9 → 1.5000 Bar Druckablass (Hauptleitungsdruck von 5 Bar auf 3.5 Bar bedeutet die stärkstmögliche Bremswirkung. - Totmannpedal:
Jeweils nach gefahrenen 1.5 km Weg (ca. jede Minute bei 80 km/h) muss das Totmannpedal, der Fahrschalter oder der Druckluftbremshebel betätigt werden, sonst ertönt ein intermittierender Summton und nach weiteren befahrenen 100m wird eine Vollbremsung(Schnellbremsung) eingeleitet und zusätzlich die Lokomotive mittels Hauptschalter abgeschaltet. - Rückstellschalter für Zugsicherung:
Beim Überfahren eines geschlossenen Vorsignals (Warnung) ertönt ein kurzer Summton und eine gelbe Lampe (Warnanzeige) neben dem Rückstellschalter leuchtet auf und erlöscht erst wieder, wenn mit dem Rückstellschalter das geschlossene Vorsignal quittiert worden ist. Wird das geschlossene Vorsignal nicht quittiert, erfolgt nach 100 meine Vollbremsung (Schnellbremsung) und die Lokomotive wird mit dem Hauptschalter ausgeschaltet. - Bremsauslösepedal:
Wird der Zug elektrisch gebremst und danach zusätzlich noch mit Druckluft, so muss die Druckluftbremse an der Lokomotive abgeschaltet (ausgelöst) werden, ansonsten die Fahrmotoren galvanisch vom Netz abgehängt würden. Bedingt durch die von den Fahrmotoren ausbleibende Bremskraft hätte dies eine unangenehme Erschütterung (Ruck) des Zuges zur Folge. - Bedienelemente für die Menueführung:
Folgende Textfelder werden dazu verwendet, um Randbedingungen für die Simulation zu setzen:- Textfeld Filename des Fahrszenarios (zB. Gotthard.SZN)
- Textfeld Haftreibungskoeffizient (Schön-/Schlechtwettervariante zB. uh = 0.3)
- Menuwahl Verlassen des Graphikmodus (Verlassen der Simulation)
(Bemerkung: Im Jahre 1991 wurde bei PC-Betriebssystemen noch zwischen Graphik- und Textmodus unterschieden bzw. musste per SW-Anweisung umgeschaltet werden. Damalige Bildschirme zeigten 640 Pixel x 480 Pixel an.) - Menuwahl Verlassen des Programms (Zurück ins DOS)
(Bemerkung: Im Jahre 1991 war DOS bei PC das Betriebssytem der Wahl. MS-Windows war erst in den Anfängen.)
Ausgabeeinheit
Betriebsrelevante, lokomotivseitige Ausgabeelemente → Diese Instrumente werden funktionsfähig implementiert:
- Manometer für den Hauptleitungsdruck 1..9 Bar
- Manometer für den Bremszylinderdruck der vordersten Lok-Achse
- Geschwindigkeitsanzeige 0..160 km/h
- Höchster Fahrmotorstrom 0..4000 Ampere
- Warnlampe der Zugsicherung
- Meldelampe für Schleuderanzeige
- Manometer 1:
Luftdruck im Hauptluftbehälter. Skala 0..10 Bar. Fix angezeigt wird: 10 Bar. - Manometer 2:
Druck des Bremszylinders vom Drehgestell unter dem jeweiligen Führerstand. Kommt in der Simulation nicht zur Anzeige. - Volt-Meter:
Fahrdrahtspannung. Skala 0..15 kV. Fix angezeigt wird: 15 kV. - Amperemeter Primärstrom:
Differenzstrom zwischen dem Motor, der am meisten Strom bezieht, zu dem, der am wenigsten Strom bezieht. Skala 0..1000 A. Fix angezeigt wird: 0 A. - Amperemeter Differenzstrom:
Primärstrom ab 15 kV-Netz. Kommt in der Simulation nicht zur Anzeige.
Die virtuelle Signalanzeige
Unter virtueller Signalisierung wird die Darstellung von Signalstellungen auf einem speziell dafür vorgesehenen Anzeigefeld verstanden.
Drei Signalarten werden virtuell angezeigt: Vor- , Hauptsignale und Neigungs-Signaltafeln (Neigungszeiger).
Die virtuelle Darstellung wurde gewählt, um unabhängig von der Auflösung der Graphik-Karte (VGA) eine eindeutige Signalisierung zu gewährleisten.
Die Darstellung der Signale aus der Sicht des Lokführers wäre zwar realitätsnaher, birgt aber durch den Fahreffekt die Gefahr, dass die Signale verschwimmen.
(Nachleuchten des Bildschirmes)
- Anzeigefeld 1: Auf dem das in Sichtweite erkennbare Signal [Vorsignal/Hauptsignal] mit Angabe der jeweiligen Entfernung gezeigt wird.
- Anzeigefeld 2: Auf dem die Signaltafel [Steigung/Ebene/Gefälle] gezeigt wird.
Messagebox
In einem speziell dafür reservierten Feld werden dem Benutzer Meldungen angezeigt, wie zB. einen Kommentar bei Bremsauslösung.
2.5 Das Grobkonzept für den Fahrsimulator
Der Lokomotiv-Fahrsimulator besteht aus mehreren Komponenten:
- Fahrszenario: Beschreibung der zu befahrenden Strecke.
- MMI: Ein- und Ausgabe.
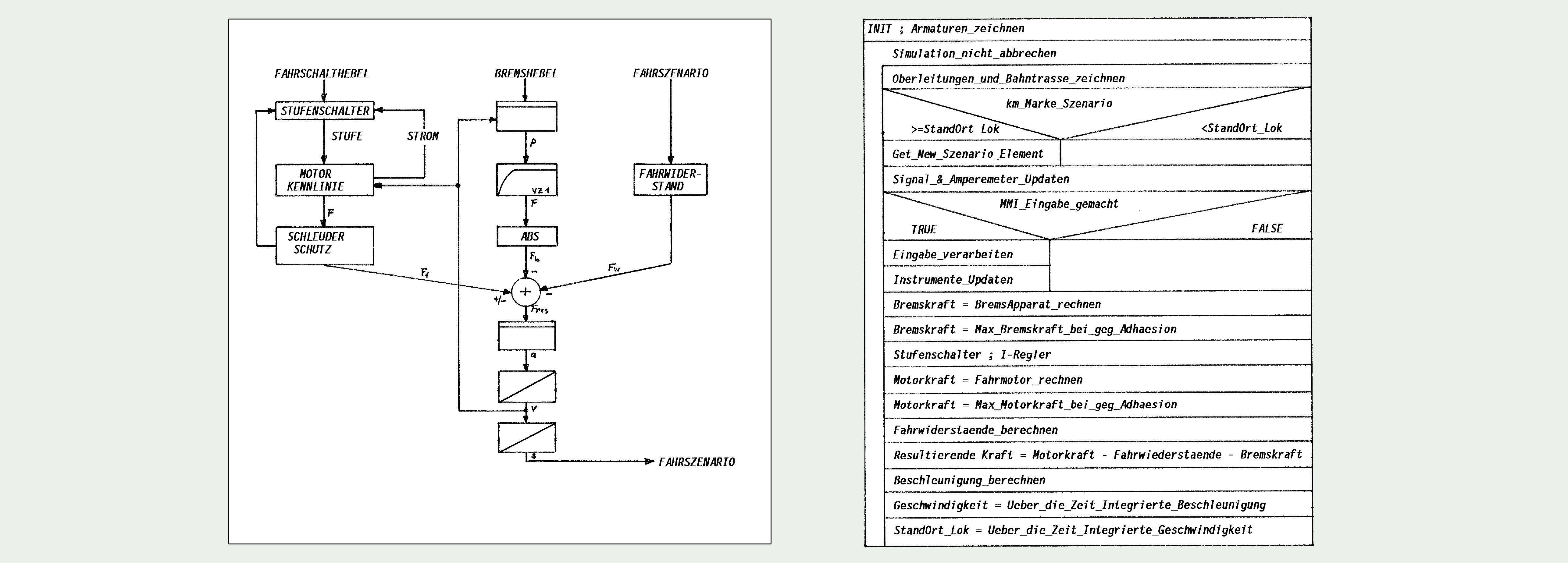
- Rechenmodell des Zuges: Formulierung der physikalischen zusammenhänge. (Blockschaltbild des Lokmodells)
- Supervisor: Ueberwacht die Zugsfahrt in bezug auf das Fahrszenario, prüft, ob die Zugkraft auf die Schiene gebracht werden kann und veranlasst den Fahrstufenautomat, auch bei Fehlmanipulationen richtig zu arbeiten.
- Performer: Erzeugt bewegte Graphik resp. den Fahreffekt. (Sicht aus dem Frontfenster der Lokomotive)
- Timemanager: Koordiniert die verschiedenen Aktivitäten und kontrolliert die zeitabhängigen Abläufe. (zB. Aufschalten des Fahrstufenautomats, Bildschirm-Update bewirken, MMI behandeln usw.)
Das Fahrszenario
Für eine möglichst flexible Programmgestaltung wird die Strecke, die befahren werden soll, nicht fix programmiert. Vielmehr soll es mit einem Texteditor möglich sein, ein idividuelles Fahrszenario zusammenzustellen, das dann später beim Start des Simulationsprogramms von diesem automatisch gelesen und zur Ausführung gebracht wird. Sämtliche Ereignisse werden in Entfernung vom Startpunkt aus bezogen. Das heisst, die folgenden Elementen werden mit einer km-Marke versehen, die angibt, wieviel Weg in Meter seit dem Start schon befahren wurden.
Elemente des Fahrszenarios
- Fahrt in Steigung (max. 27 Promille)
- Fahrt in Ebene (0 Promille)
- Fahrt im Gefälle (max. 27 Promille)
- Fahrt in Kurve mit Radius Rl, wobei zu beachten ist:
Kurven im Flachland (bis 160 km/h) → R=1200 Meter
Kurven im Gebirge (bis 80 km/h) → R=300 Meter
Minimalradius, kurze Weichen (bis 40 km/h) → R=180 Meter - Lichtsignale:
Vorsignal mit einem bestimmten Fahrbegriff in Sichtweite von n Meter.
Hauptsignal mit einem best. Fahrbegriff in Sichtweite von n Meter.
Ein Vorsignal kündigt in dieser Simulation ein den gleichen Fahrbegriff zeigendes Hauptsignal an. Im Fahrszenario wird nicht der eigentliche Standort des Signals angezeigt, sondern die Wegmarke, an der es erstmals zu sehen ist. Der zweite Parameter macht eine Aussage über die Entfernung bis zur tatsächlichen Lage des Sinals. Dadurch ist es möglich, ab Signalsichtweite die Distanz zum Signal virtuell anzuzeigen. Es ist denkbar, dass nach einer Einfahrt in eine Gerade Vor- und Hauptsignal gleichzeitig (resp. Hauptsignal vor Erreichen des Vorsignals) sichtbar sind. Sollte ein Signalverband einen Fahrbegriff anzeigen, so ist dieser spätestens nach passieren des Hauptsignals einzuhalten. (Dies kann vom Simulator resp. vom Supervisor auch überprüft werden)
Beispiel eines möglichen Fahrszenarios
Die Elemente werden mit einem Texteditor (zB. Norton-Editor) physikalisch sinnvoll zusammengestellt und in ein Textfile gespeichert. Eine solche Zusammenstellung kann zB. folgendermassen aussehen (Das Fileformat muss noch definieret werden.)
- km 0.0 - 1.1: Fahrt in Ebene
- km 1.1 - 1.1: Vorsignal mit Fahrbegriff 3 (65 km/h) in 200 Meter
- km 1.1 - 2.0: Fahrt in Ebene
- km 2.0 - 2.0: Hauptsignal mit Fahrbegriff 3 (65 km/h) in 200 Meter
- km 2.0 - 2.8: Fahrt in Kurve mit Radius 400m
- km 2.8 - 3.5: Fahrt in Ebene
- km 3.5 - 3.5: Vorsignal auf freie Fahrt in 200 Meter
- km 3.5 - 4.5: Fahrt in Ebene
- km 4.5 - 4.5: Hauptsignal auf freie Fahrt in 200 Meter
- km 4.5 - 5.8: Fahrt in Ebene
- km 5.8 - 7.5: Fahrt in Steigung
- km 7.5 - 8.3: Fahrt in Ebene
- km 8.3 - 8.3: Vorsignal auf Warnung in 200 Meter
- km 8.3 - 9.3: Fahrt in Ebene
- km 9.3 - 9.3: Hauptsignal auf Halt in 200 Meter
- km 9.5 - 9.5: Parcours beendet
 Bei der Anordnung der Elemente müssen folgende Regeln beachtet werden :
Bei der Anordnung der Elemente müssen folgende Regeln beachtet werden :
- Als Ausgangs- oder Startpunkt kommt grundsätzlich jede Trasse-Art in Frage.
- Nach einem Vorsignal muss mindestens in Bremswegentfernung ein Hauptsignal mit gleichem Fahrbegriff folgen.
- Ein Hauptsignal darf nur in Begleitung mit einem Vorsignal auftreten.
Rechenmodell des Zuges
Einen Berechnungs-Überblick bietet das folgende Blockschaltbild:
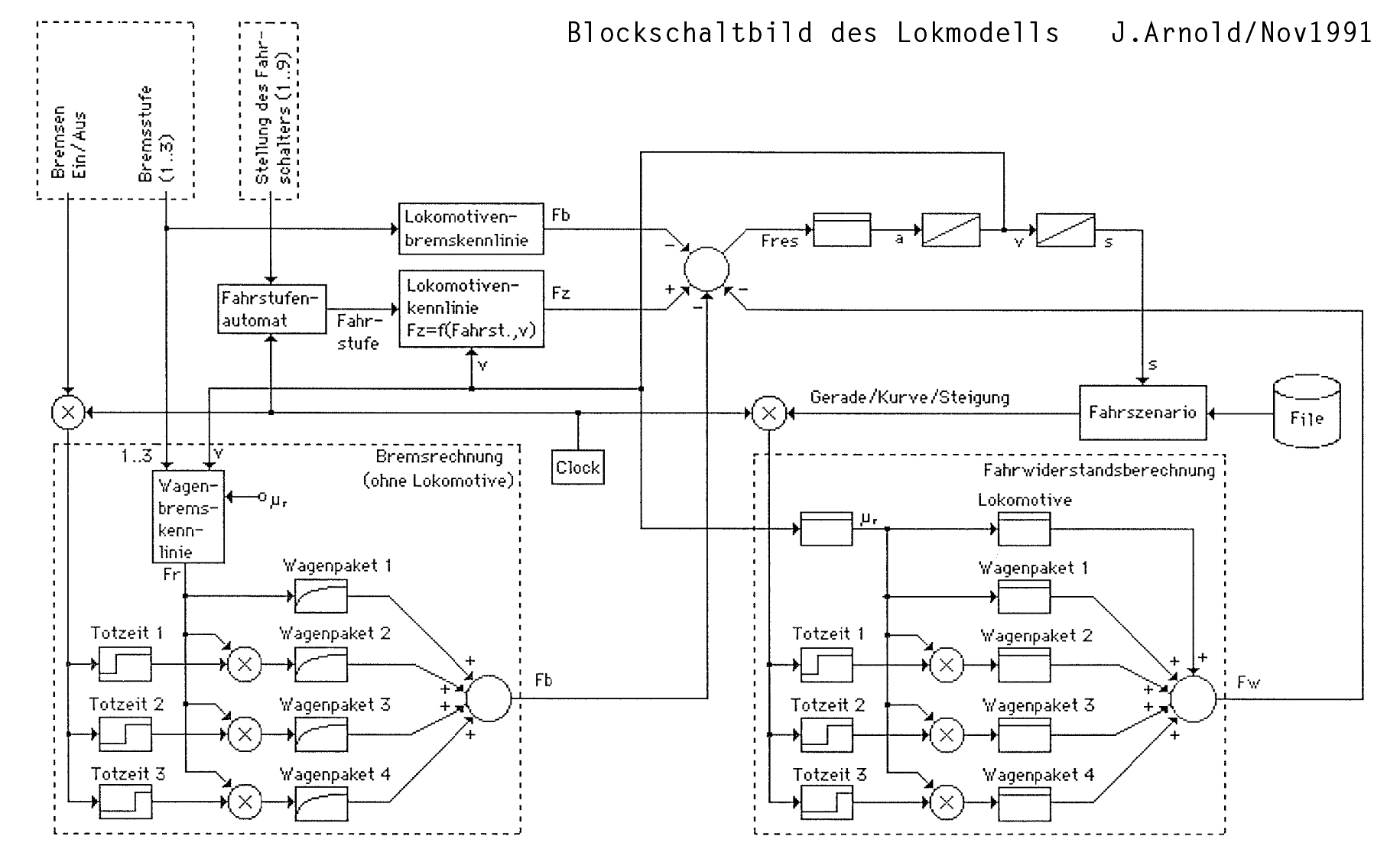
- Situationsänderungen in der Gleisführung (Steigung/Ebene/Gefälle) oder beim Bremsen mit Druckluft gelten nicht für den ganzen Zug gleichzeitig. Je weiter die Wagen von der Lokomotive entfernt sind, desto später trifft dort die neue Gegebenheit ein (zB. Durchschlaggeschwindigkeit bei der autom. Druckluftbremse). Um die Komplexität zu reduzieren, sollen 4 Wagenpakete gebildet werden. Eintreffende Ereignisse gelten für Wagen im selben Wagenpaket dann gleichzeitig. Die zeitlichen Verzögerungen zu den folgenden Wagenpaketen sollen die Totzeitglieder symbolisieren.
- Die Fahrwiderstandsberechnungen der Wagenpakete und der Lokomotive setzen sich aus Laufwiderstand, Bogenwiderstand und Neigungswiderstand zusammen. Der Luftwiderstand wird in dieser Berechnung nicht berücksichtigt.
- Die Zugkraft wird aus der Fahrstufen-Geschwindigkeits-Zugkraft Kennlinie der Lokomotive berechnet.
- Alle an der Fahrbewegung beteiligten Kräfte werden summiert und daraus die Geschwindigkeit und der zurückgelegte Weg berechnet.
- Die Geschwindigkeit zum Zeitpunkt (t-1) wird für die Zugkraft zum Zeitpunkt t benötigt. Bei t0=0 ist t-1 ebenfalls 0.
Der Supervisor
Auf die Ereignisse wie Signale, Trasseart und Kurven, welche vom Fahrszenario bestimmt sind, muss via MMI richtig reagiert werden. Wenn der Fahrstufenschalter nicht richtig bedient wird, sorgt der Supervisor dafür, dass es nicht zum Programmabsturz kommt. Eine weitere Aufgabe des Supervisors ist zu prüfen, ob die durch Fahrstufe und Geschwindigkeit gegebene Zugkraft der Lokomotive auch in Bewegung umgesetzt werden kann bzw. ob der Haftreibungskoeffizient auch genügt. Ist dies nicht der Fall, veranlasst er eine Unterbrechung der Beschleunigungsphase und schaltet den Stufenschalter zurück, bis die Zugkraft am Gleis wieder greift. Zusätzlich beginnt die Meldelampe für Schleuderanzeige zu leuchten.
Der Timemanager
Alle Berechnungen, Entscheide, MMI-Abfragen usw. müssen mehrmals pro Sekunde durchgespielt werden. Dies unter anderem aus folgenden Gründen:
- Eine lineare Verzögerung des Zuges (wenn zB. elektrisch und pneumatisch gebremst wird) bewirkt eine quadratische Geschwindigkeitsänderung bzw. eine kubische Wegänderung. Ist die Berechnung nicht genügend hoch oder schnell aufgelöst, erhält man in der Geschwindigkeit und noch viel extremer beim Weg unangenehme Sprünge. Das sind Mängel die nicht unbedingt zur Genauigkeit des Supervisors/Fahrszenario-Gespanns beitragen würden. Somit müssen solche Bewegungsabläufe vernünftig hoch aufgelöst werden.
- Der Fahrstufenautomat schaltet in der unteren Beschleunigungsphase dreimal pro Sekunde auf.
- Bewegte Graphik benötigt mehrere Bildschirmupdates pro Sekunde, um kontinuierlich zu wirken (Vgl. Film: 16 Bilder pro Sekunde)
2.6 Bedienung der Lokomotive
Um die Handlungen im Führerstand dem Laien etwas näherzubringen und um den Fahrstufenautomat besser zu verstehen, folgt nun eine Einführung zur Bedienung der Lokomotive:
- Das Anfahren: Den Fahrschalter je nach Erfordernissen auf FahrenM, Fahren+ oder Fahren++ stellen.
- Während der Fahrt: Den Fahrschalter in folgende Stellungen verbringen:
Fahren+ oder Fahren++, wenn die Zugkraft oder die Geschwindigkeit vergrössert resp. der Stufenschalter aufgeschaltet werden soll.
Fahren• wenn der Stufenschalter auf der zuletzt angesteuerten Stufe stehen bleiben soll.
Fahren -, wenn die Zugkraft verringert, resp. der Stufenschalter zurückgeschaltet werden soll. - Abschalten der Zugkraft: Den Fahrschalter in die Stellung Fahren- verbringen und dort belassen, bis der Fahrmotorstrom auf etwa 800 Ampere gesunken ist.
Anschliessend kann auf die Position0 geschaltet werden.
Im Notfall ist der Fahrschalter sofort auf die Position0 zu stellen, bedingt durch das Abreissen der Zugkraft wird der Zug aber unangenehm erschüttert und ein Besuch bei der Lokdepotinspektion wird fällig. - Aufschalten der elektrischen Bremse: Bei gelösten Druckluftbremsen an der Lokomotive, den Fahrschalter aus der Stellung Position0 auf
Bremsen+ drehen und beim Erreichen der gewünschten Bremskraft auf Bremsen• zurückstellen.
Genügt die von der elektrischen Bremse erzeugte Wirkung nicht, so ist zusätzlich die automatische Druckluftbremse des Zuges zu betätigen. Um ein Ausschalten der elektrischen Bremse zu verhüten, ist gleichzeitig die Bremsauslösung zu betätigen. - Abschalten der elektrischen Bremse: Der Fahrschalter ist in die Stellung Bremsen- zu verbringen und dort zu belassen, bis der Bremsstrom mindestens auf 500 Ampere gesunken ist. Nachher kann auf Position0 gestellt werden. Wird die elektrische Bremse bei Verwendung der Druckluftbremse und vergessener Bremsauslösung zwangsabgeschaltet, so ist der Fahrschalter sofort auf Position0 zu stellen.
2.7 Berechnungsgrundlagen → Fahren & Bremsen
Durch die Spurführung der Bahn reduziert sich die Bewegung des Zuges auf einen eindimensionalen translatorischen Vorgang. Auf diese Bewegungsrichtung entlang der Strecke (Fahrtrichtung)
beziehen sich alle Vorgänge der Mechanik. Der Kraftbedarf für die Bewegung des Zuges ermittelt sich aus der Anhängelast, den Fahrwiderständen
und der aktuellen Geschwindigkeit des Zuges, im Falle des Lokomotiv-Fahrsimulators allerdings in umgekehrter Reihenfolge, das heisst: je nach eingestellter Zugkraft (Fahrstufe)
und Belastung resultiert eine Beschleunigung resp. eine Geschwindigkeits- und somit Wegänderung.
Wie man den folgenden Ausführungen entnehmen kann, sind die Widerstandsgleichungen nicht immer geschlossen lösbar. Es wird in vielen Fällen die Geschwindigkeit benötigt,
um zB. den Laufwiderstand zu berechnen, der wiederum zu einer resultierender Geschwindigkeit beitragen soll. Dies ist mitunter ein Grund, warum der Simulator zeitdiskret gelöst werden soll.
Wird nämlich das Zeitintervall sehr klein gewählt, kann für die Laufwiderstandberechnung zum Zeitpunkt t0 der Geschwindigkeitswert zum Zeitpunkt t-1 verwendet werden.
Zu jedem betrachteten Zeitpunkt während der Fahrt erfolgt diese Traktionsrechnung:
- Ermitteln der Zug- oder Bremskraft über die gewählte Fahr- oder Bremsstufe. Da der Fahrstufenautomat ein Regelsystem ist, dass als Führungsgrösse den Motorenstrom benötigt, muss die Zugkraft auf den Motorenstrom zurückgerechnet werden.
- Kontrolle ob bei gegebenen Verhältnissen diese Zug- oder Bremskraft durch die Adhäsion auf die Schiene gebracht werden kann. Anderfalls Zugkraft reduzieren bzw. Fahrstufe reduzieren.
- Aufsummieren der zu diesem Zeitpunkt auftretenden Fahrwiderständen.
- Berechnen der resultierenden Beschleunigung.
- Berechnen der Geschwindigkeit.
Die Ermittlung der Zugkraft
Als Ausgangslage dienen die bereits in der Einleitung vorgestellte Motorenkennlinien der Re 6/6:
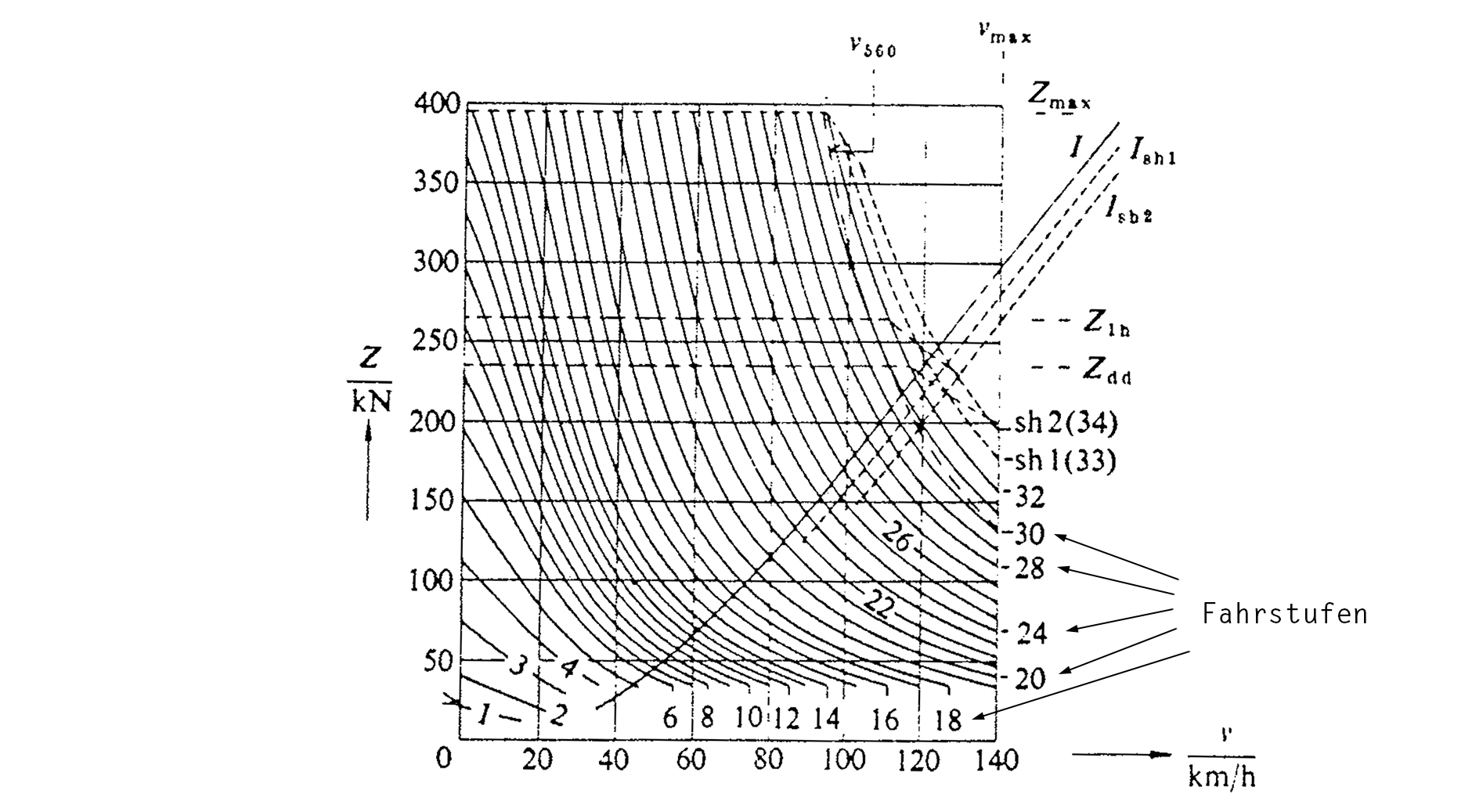 Wie man daraus erkennen kann, bildet jede Fahrstufe einen eigenen Graphen.
Es gilt nun, diese Graphen mathematisch möglichst einfach aber genügend genau zu beschreiben. Genügend genau soll bedeuten: Fehlerschranke = 5 kN.
Wie man daraus erkennen kann, bildet jede Fahrstufe einen eigenen Graphen.
Es gilt nun, diese Graphen mathematisch möglichst einfach aber genügend genau zu beschreiben. Genügend genau soll bedeuten: Fehlerschranke = 5 kN.
Die Zugkraft ist in unserem Falle eine Funktion der Geschwindigkeit. Da sich die Kennlinien ähnlich verhalten, wird zuerst eine allgemein gültige Funktionsgleichung gesucht.
Danach werden durch die Wahl von geeigneten Stützwerten die Koeffizienten der einzelnen Funktionen bestimmt.
Besonders ist darauf zu achten, wie sich die gewählten Funktionen ausserhalb des relevanten Bereichs, der zwischen 0..140 km/h und 0..400 kN liegt. verhalten:
Würde man ein Polynom zweiten Grades wählen, hätte zB. die Kennlinie für die erste Fahrstufe bei etwa 40 km/h ein Minima und würde dann wieder quadratisch
in den positiven Kraftbereich ansteigen. Dass hätte den Nachteil, dass fälschlicherweise eine grosse Geschwindigkeit eine grosse Zugkraft ergeben würde.
Dies müsste mit einer Vergleichsoperation unterdrückt werden, was wiederum kostbare Rechenzeit benötigt.
Mit y=1/(ax2+bx+c) wurde eine geeignete Funktion gefunden, bei der sich jede Kennlinie für grosse Geschwindigkeiten der Nulllinie (Zugkraft=0) nähert
und die über den ganzen Bereich hinreichend genau ist.
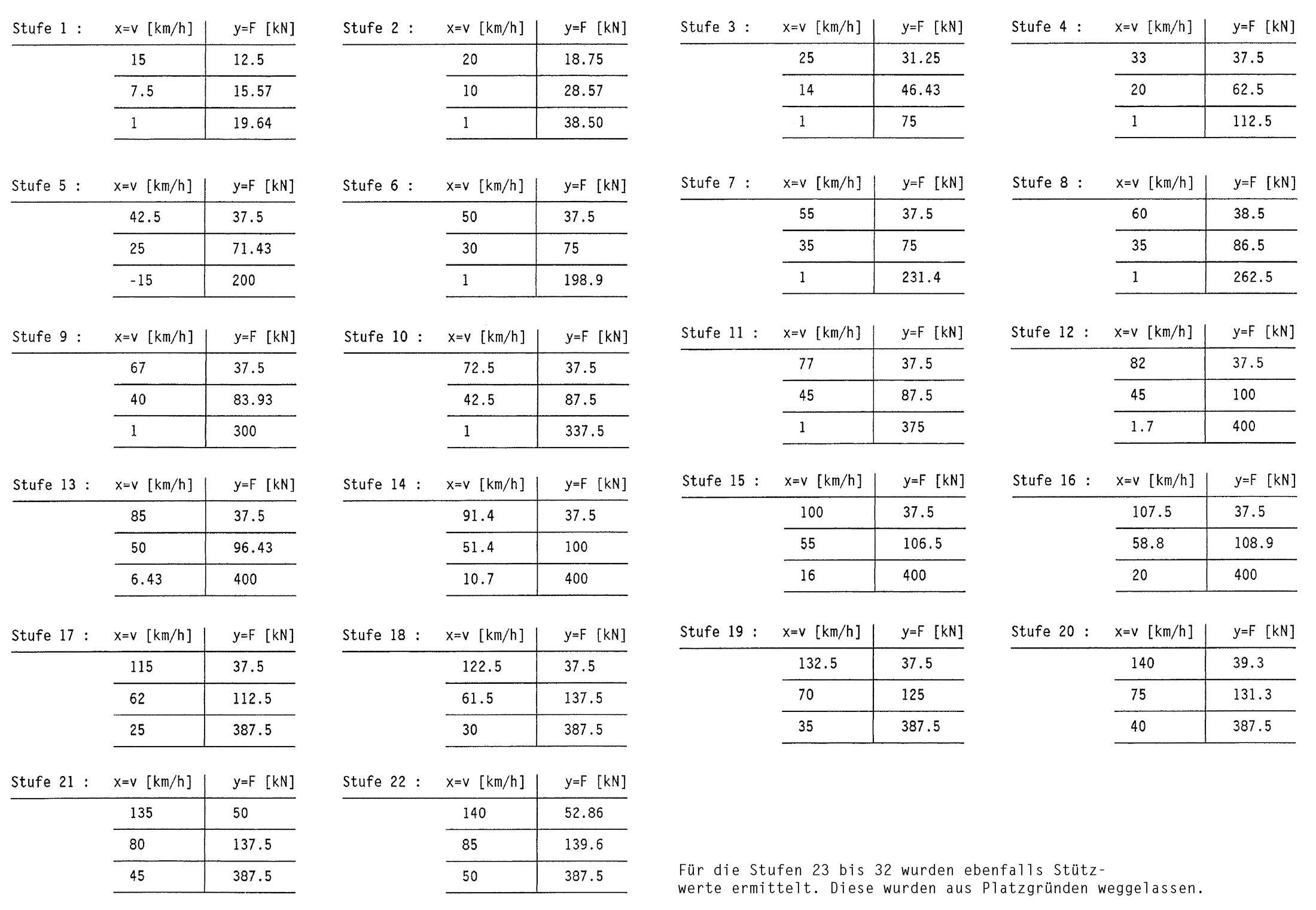
Herauslesen von geeigneten Stützwerten:
 Die Koeffizientenrechnung:
Die Koeffizientenrechnung:
(Um diese Dokumentation nicht unnötig aufzublähen, wird im folgenden von den 32 erstellten Berechnungen nur die erste (Fahrstufe 1) detailliert aufgezeigt.)
Die aus der für die Stufe 1 gegebenen Kurve herausgelesenen Werte lauten:
Stufe1: x=v [km/h] x=v [m/s] y=F [kN] 1/y=1/F [1/kN]
—————————— ————————— ———————— ——————————————
15 4.167 12.5 0.08000
7.5 2.083 15.57 0.06423
1 0.278 19.64 0.05092
Der x-Wert wurde von km/h auf m/s umgerechnet. Dies darum, um bei der Implementation
überflüssige und zeitraubende Einheitenkonvertierungen zu ersparen.
Ausserdem wurde der invertierte Wert von y berechnet, um das Einsetzen in den Gleichungsansatz zu erleichtern.
Der Gleichungsansatz lautet: y = 1 / (ax2 + bx + c)
Dies ergibt mit den eingesetzten Stützwerten folgende drei Gleichungen mit den drei Unbekannten a,b,c:
0.08000 = a*152 + b*15 + c
0.06432 = a*7.52 + b*7.5 + c
0.05092 = a*12 + b+1 + c
Diese Gleichungssystem lässt sich mit einer Matritzenrechnung rationell lösen:
|0.08000| |225 15 1| |a|
|0.06432| : |56.25 7.5 1| = |b|
|0.05092| |1 1 1| |c|
Daraus erhält man die Koeffizienten:
a = 50.89e-6 b = 7.250e-3 c = 48.90e-3
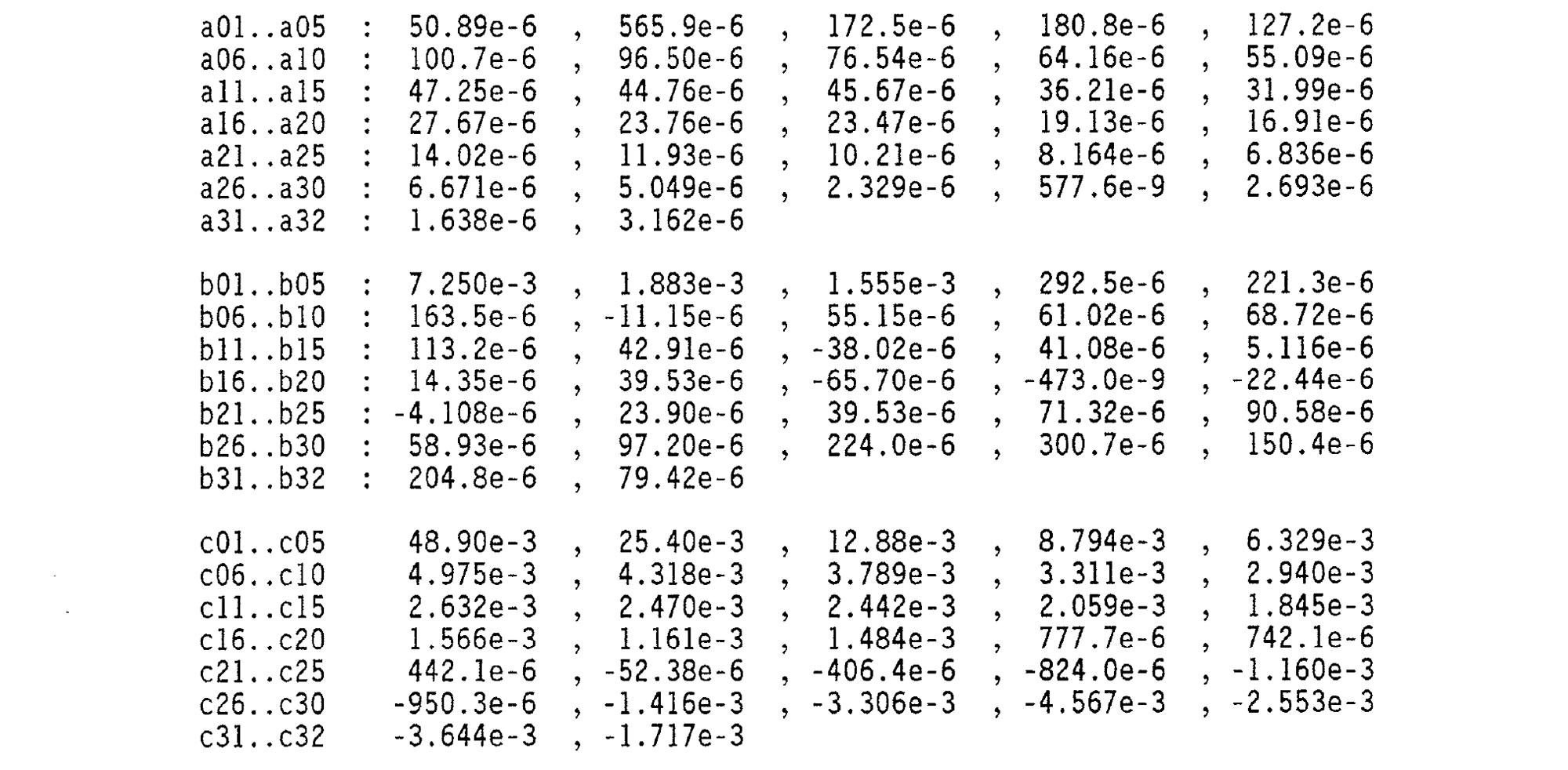
Die für alle 32 Fahrstufen berechneten Koeffizienten lauten:
(Die Koeffizienten sind auf Geschwindigkeit in Meter/Sek skaliert)
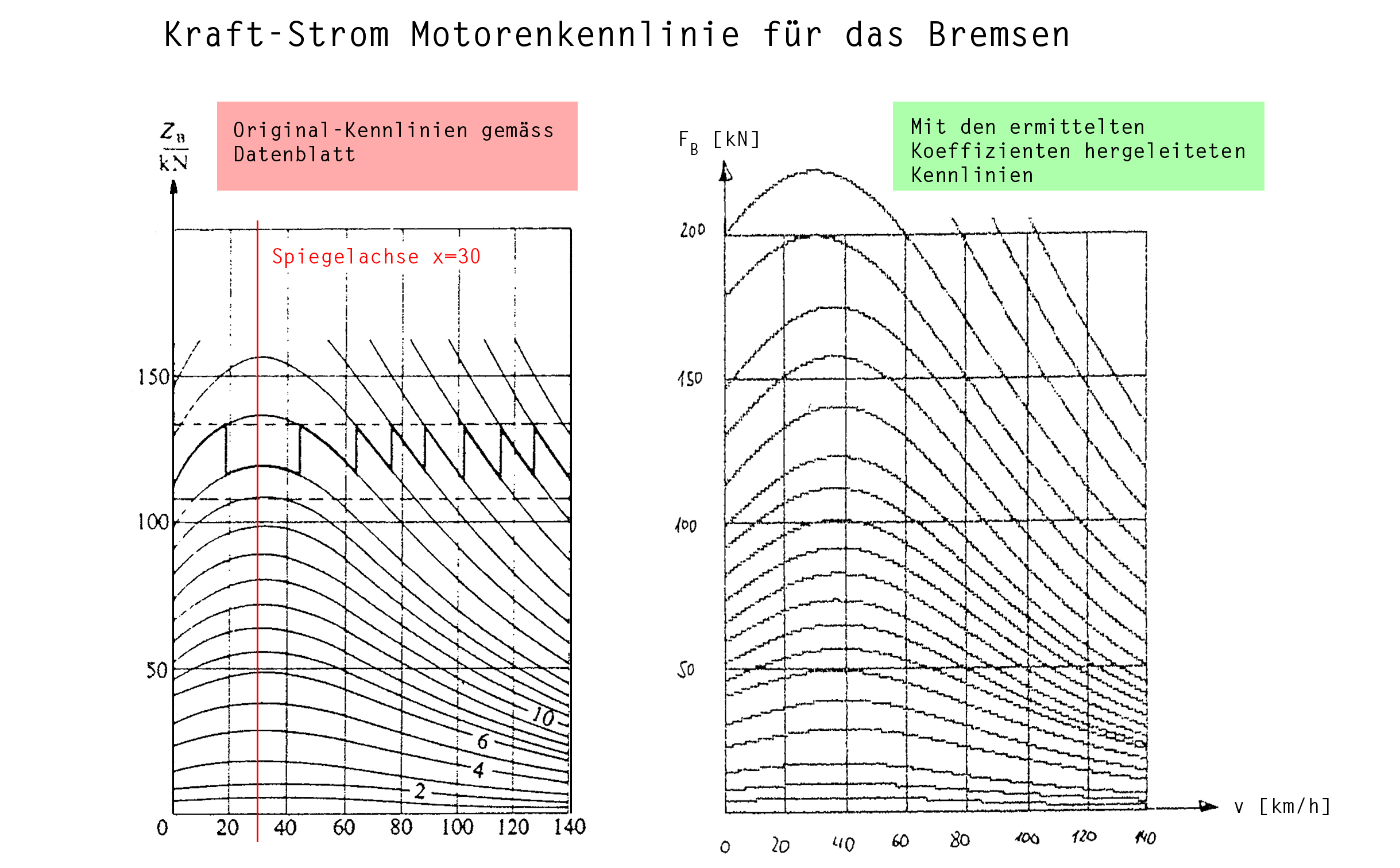
Die Ermittlung der elektrischen Bremskraft
Als Ausgangslage dient auch dieses Mal die bereits in der Einleitung vorgestellte Motorbremskennlinien der Re 6/6:
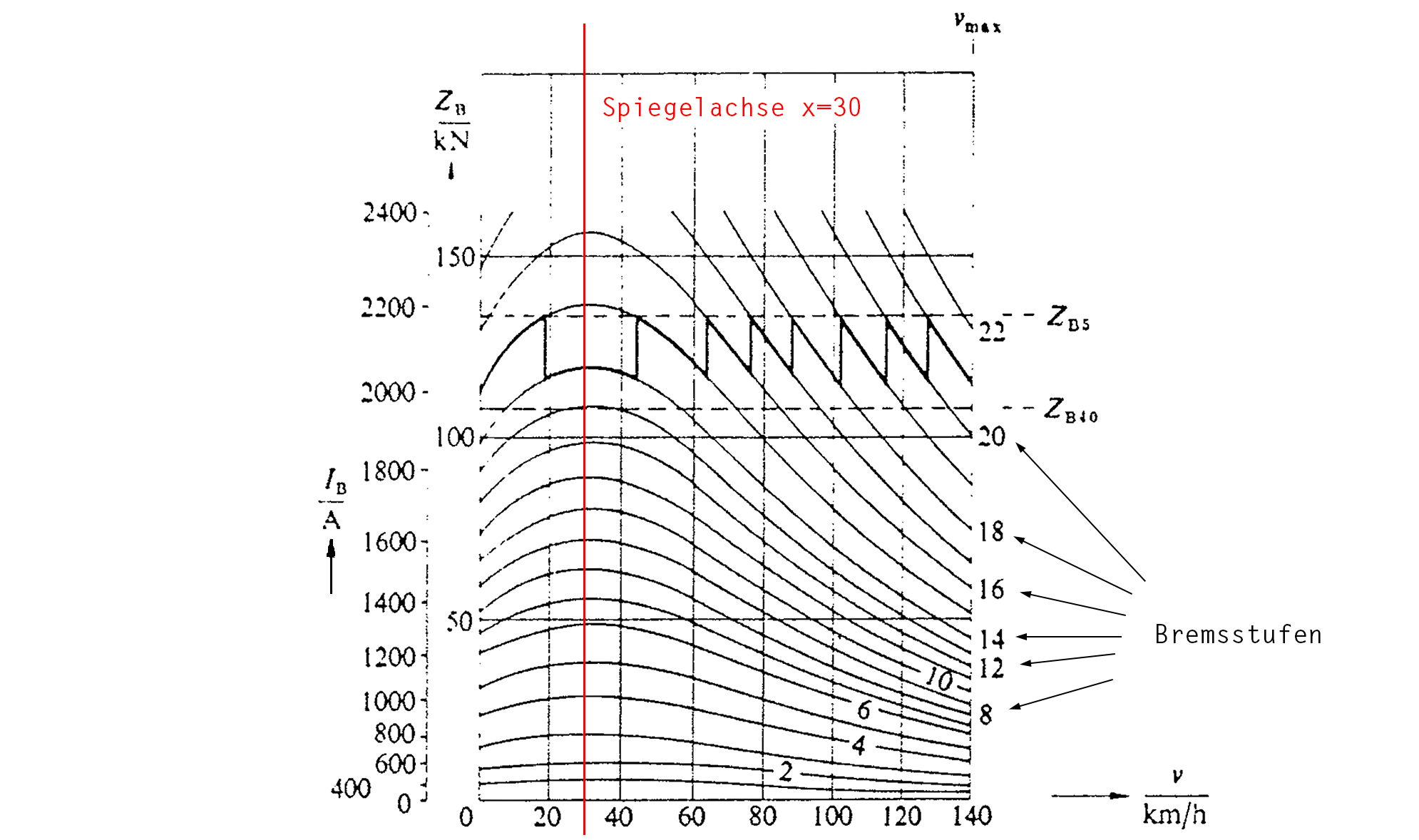 Die Kurven haben eine Resonanzcharakteristik. Mit y=1/(ax2+bx+c) wurde wiederum ein geeigneter Gleichungsansatz gefunden,
der diesem Umstand entsprechend Rechnung trägt. Die Stützpunkte wurden so gewählt, dass immer ein Wertepaar
den Kulminationspunkt fixiert {x=30/y=f(x)}. Bei den Kennlinien für die Bremsstufen 18 bis 22 musste bei der Koordinatenbestimmung
ein Trick angewandt werden: Um ebenfalls das Maxima bei x=30 zu erhalten, wurde der Schnittpunkt des Graphen mit der
Aequidistanzlinie F=170kN an der Geraden x=30km/h auf die negative x-Seite gespiegelt. Dazu das folgende Beispiel:
Die Kurven haben eine Resonanzcharakteristik. Mit y=1/(ax2+bx+c) wurde wiederum ein geeigneter Gleichungsansatz gefunden,
der diesem Umstand entsprechend Rechnung trägt. Die Stützpunkte wurden so gewählt, dass immer ein Wertepaar
den Kulminationspunkt fixiert {x=30/y=f(x)}. Bei den Kennlinien für die Bremsstufen 18 bis 22 musste bei der Koordinatenbestimmung
ein Trick angewandt werden: Um ebenfalls das Maxima bei x=30 zu erhalten, wurde der Schnittpunkt des Graphen mit der
Aequidistanzlinie F=170kN an der Geraden x=30km/h auf die negative x-Seite gespiegelt. Dazu das folgende Beispiel:
Stufe 19: x=v [km/h] y=F [kN]
—————————— ————————
140 89.14
80 170
??? ???
Der Punkt (80/170) gespiegelt an x=30 ergibt (-20/170)
Die Tabelle kann nun vervollständigt werden:
Stufe 19: x=v [km/h] y=F [kN]
—————————— ————————
-20 170
80 170
140 89.14
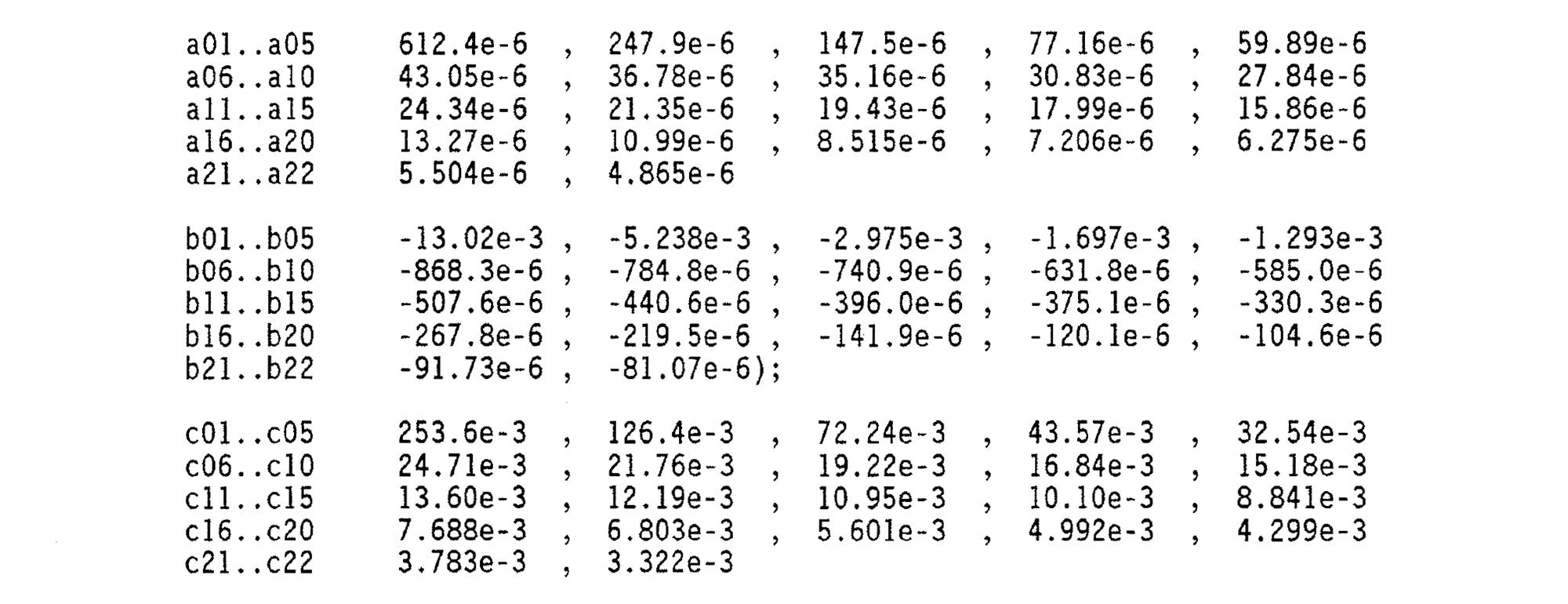
Herauslesen von geeigneten Stützwerten: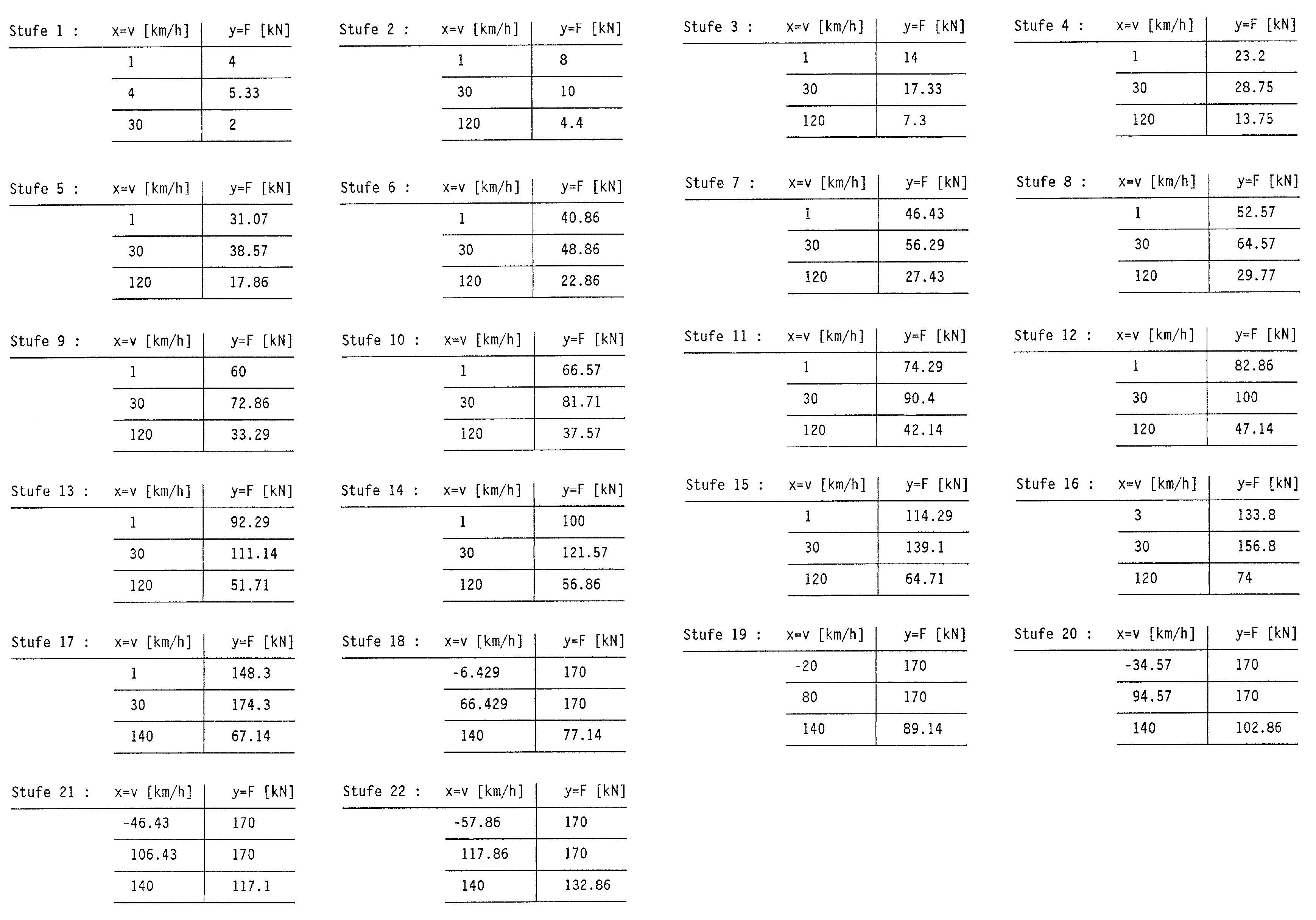 Analog denselben Überlegungen wie bei der Ermittlung der Koeffizienten für die 32 Fahrstufen, erhält man für die 22 Bremsstufen folgende Werte:
(Die Koeffizienten sind auf Geschwindigkeit in Meter/Sek skaliert)
Analog denselben Überlegungen wie bei der Ermittlung der Koeffizienten für die 32 Fahrstufen, erhält man für die 22 Bremsstufen folgende Werte:
(Die Koeffizienten sind auf Geschwindigkeit in Meter/Sek skaliert)
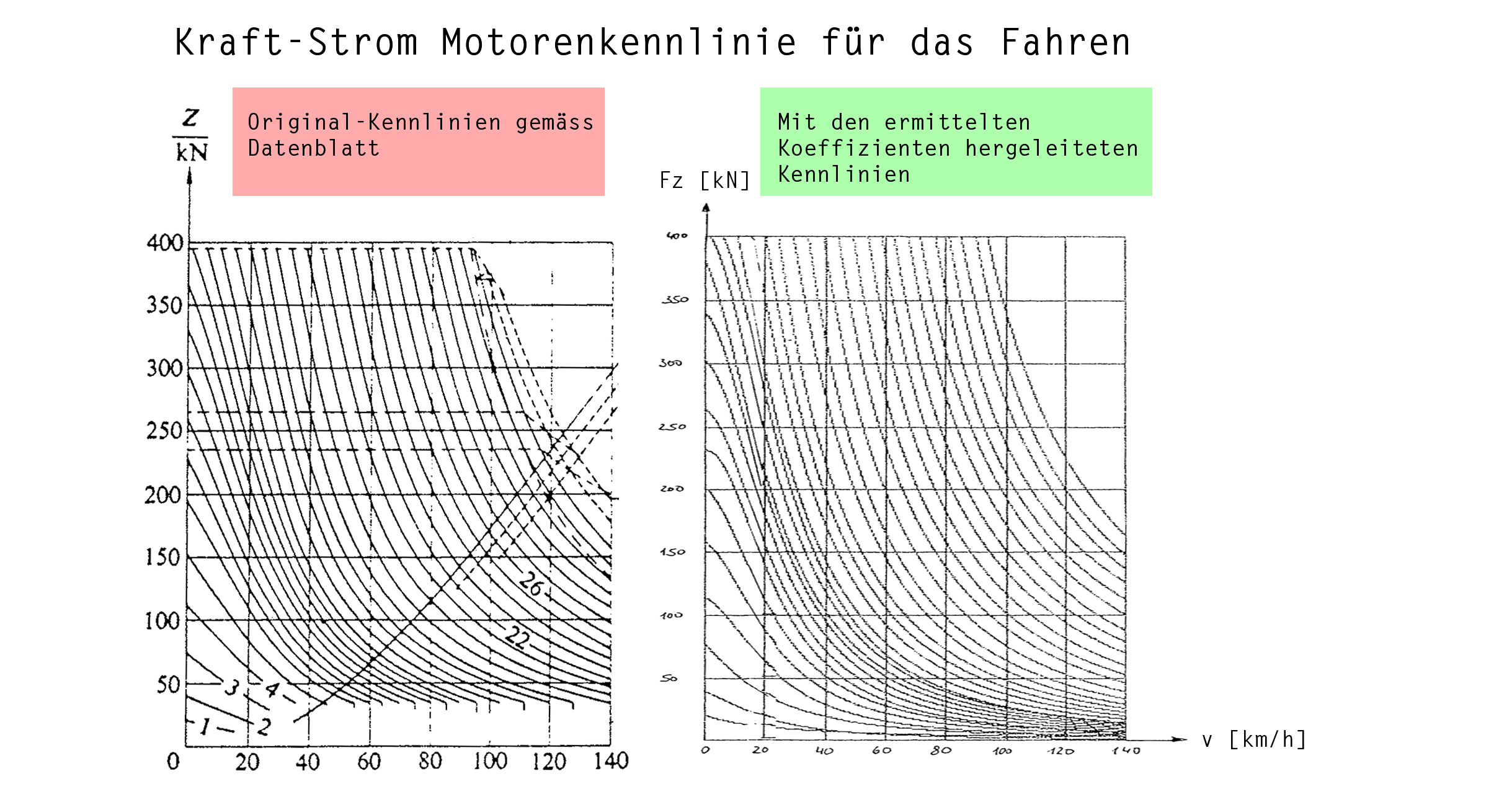
Die Ermittlung der Kraft-Strom Motorenkennlinie für das Fahren
Als Ausgangslage dienen wiederum die in der Einleitung vorgestellte Motorenkennlinie Re 6/6:
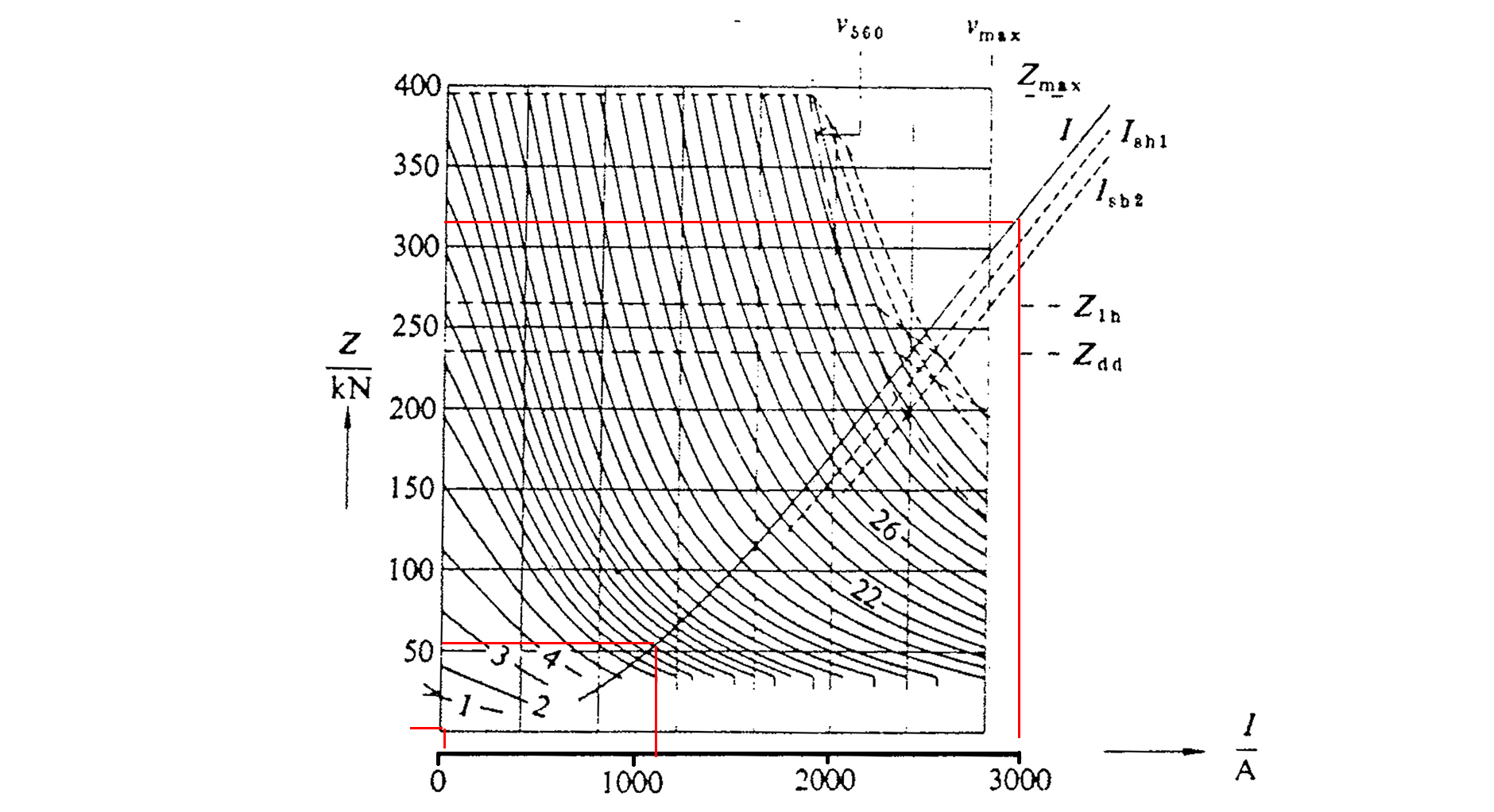 Es soll der Motorenstrom eine Funktion der Zugkraft sein.
Wie der Graph zu erkennen gibt, stellt er einen Hyperbel-Ast im 1. Quadranten der Koordinatenebene dar.
Es soll der Motorenstrom eine Funktion der Zugkraft sein.
Wie der Graph zu erkennen gibt, stellt er einen Hyperbel-Ast im 1. Quadranten der Koordinatenebene dar.
Die allgemeine Funktionsgleichung lautet:
x2 y2
——— - ——— = 1
α2 β2
Durch Umstellen der Gleichung erhält man:
_____________
y = √(ax2 + bx + c)
Weil uns nur der erste Quadrant interessiert, muss nur der positive Wurzelwert berechnet werden.
Herauslesen von geeigneten Stützwerten:
x=F [kN] y=I [A]
———————— ———————
1 1
57.5 1100
336 3000
Berechnung der Koeffizienten:
1 = a + b + c
1'210'000 = a * 3'306.25 + b * 57.5 + c
9'000'000 = a * 112'896 + b * 336 + c
Mit der Matritzenrechnung erhält man:
a = 19.57 b = 20.27e+3 c = -20.29e+3
Die grösste Fehlerabweichung der somit erhaltenen Funktionsgleichung beträgt maximal 2.0%
(210kN = 2258A anstatt 2200A)
Die Ermittlung der Kraft-Strom Motorenkennlinie für das Bremsen
Als Ausgangslage dient erneut die in der Einleitung vorgestellte Motorenkennlinie Re 6/6:
 Es soll wiederum der Motorenstrom, hier Rekuperationsstrom, eine Funktion der Zugkraft sein.
Vorerst muss abgeklärt werden, welcher Ansatz zur Beschreibung der Funktion gewählt werden muss.
Da der Strom im Kennlinienfeld nicht explizit als Graph eingezeichnet ist, soll dies hier nachgeholt werden:
Es soll wiederum der Motorenstrom, hier Rekuperationsstrom, eine Funktion der Zugkraft sein.
Vorerst muss abgeklärt werden, welcher Ansatz zur Beschreibung der Funktion gewählt werden muss.
Da der Strom im Kennlinienfeld nicht explizit als Graph eingezeichnet ist, soll dies hier nachgeholt werden:
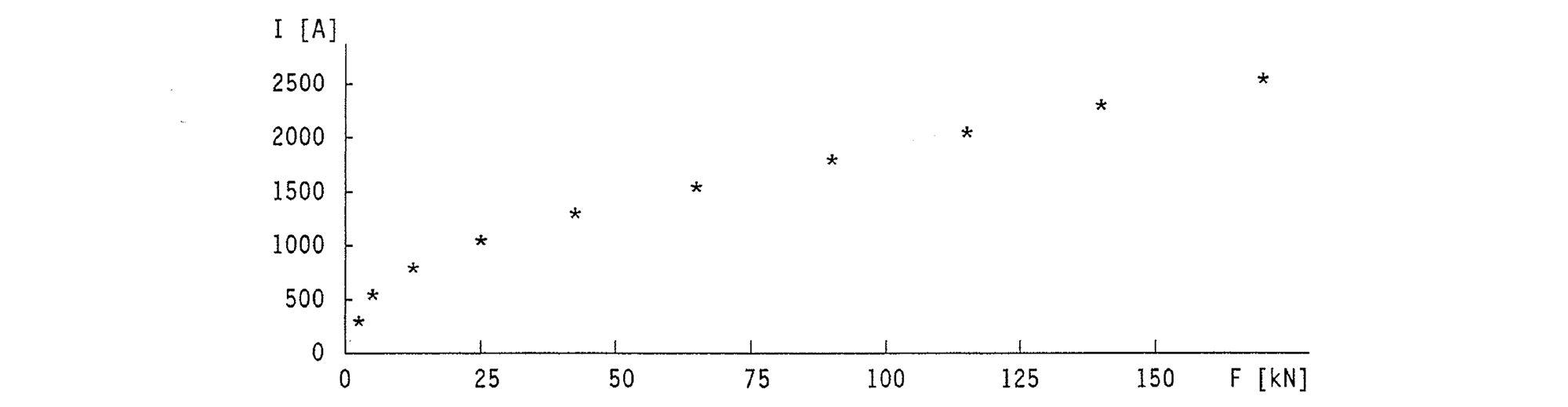 Die Kurve zeigt, dass als Funktionsbeschreiber auch da wieder der Hyperbel-Ast gewählt werden kann.
Die Kurve zeigt, dass als Funktionsbeschreiber auch da wieder der Hyperbel-Ast gewählt werden kann.
Es gilt also wieder der Ansatz:
_____________
y = √(ax2 + bx + c)
Herauslesen von geeigneten Stützwerten:
x=F [kN] y=I [A]
———————— ———————
1 1
27.2 1000
165.7 2400
Berechnung der Koeffizienten:
1 = a + b + c
1'000'000 = a * 739.84 + b * 27.2 + c
5'760'000 = a * 27'456.49 + b * 165.7 + c
Mit der Matritzenrechnung erhält man:
a = -23.7 b = 38.82e+3 c = -38.79e+3
Die grösste Fehlerabweichung der somit erhaltenen Funktionsgleichung beträgt maximal 1.2%
(110kN = 1988A anstatt 1960A)
2.8 Berechnungsgrundlagen → Fahrwiderstände
Nähere Betrachtungen der einzelnen Fahrwiderstände lassen folgende physikaliche Zusammenhänge erkennen:
- Der Roll- und Reibungswiderstand (als Anteil des Laufwiderstandes), der Bogenwiderstand und der Neigungswiderstand entstehen in erster Linie wegen der Gewichtskraft Fg des Zuges und sind ihr annähernd proportional.
- Der Beschleunigungswiderstand ist allein durch die Masse m des Zuges bestimmt.
- Der Luftwiderstand ist lediglich von der Form des Zuges abhängig. Er lässt sich durch eine idealisierte Fläche (Stirnwände, Seiten wände) ausdrücken.
Folgende Widerstände werden in dieser Simulation berücksichtigt:
- Laufwiderstand
- Bogenwiderstand
- Neigungswiderstand
- Beschleunigungswiderstand
Der Laufwiderstand wf
Der Laufwiderstand ist aus der Rollreibung (geschwindigkeitsunabhängiger Teil) und dem Luftwiderstand (quadratisch von der Geschwindigkeit abhängiger Teil) zusammengesetzt. Die verwendeten Koeffizienten wurden empirisch ermittelt. Sie sind im Buch «Elektrische Bahnen/Springer Verlag» zu finden.
wf = 2.5 + 3.888e-3 * (v + 2.8)2
wobei v = [m/s] und wf = [N/kN]
Mit dem Wert 2.8 wurde ein Gegenwind von 10 km/h angenommen.
Der Bogenwiderstand wb
In der Bogenfahrt entstehen durch die Wirkung der Fliehkraft Führungskräfte zwischen Rad und Schiene. Der Bogenwiderstand ist in erster Linie vom Bogenradius abhängig. Die Koeffizienten können auch hier nur wieder durch Messung ermittelt werden.
750
wb = ————— wobei r → [m], wb → [N/kN]
r
Der Neigungswiderstand wi
Je nach Neigung des Trasses ergibt sich eine Hangabtriebskraft. Berechnen lässt sich diese aus:
Fh = m * g * sin(β) wobei β → Winkel zwischen senkrechter Ebene und Normalen zur schrägen Ebene
Bei den kleinen Winkeln β, welche im Betrieb der Adhäsionsbahn in Frage kommen,
kann der Sinus mit hinreichender Genauigkeit durch den Tangens ersetzt werden.
m * g * sin(β)
wi = ———————————————— = tan(β
m * g
Da der Tangens dem Steigungsmass entspricht, folgt:
wi = I wobei I → [Steigung in Promille], wi = [N/kN]
Der Beschleunigungswiderstand wa
Während der Beschleunigung des Zuges ist die als Beschleunigungswiderstand Wa bezeichnete Trägheitskraft zu berücksichtigen. Die Rotationsenergie der einzeln rotierenden Massen, wie Radsätze und Antrieb dürfen dabei nicht vernachlässigt werden. Zur Beschleunigung der Masse m einschliesslich der einzeln rotierenden Massen wird somit die folgende Kraft benötigt:
Wa = a * (m + ∑J * (w/v)2)
wobei a=m/s2, J=kg/m2, w=[rad/s], v=[m/s], Wa=[N≡kgm/s2]
Der nun eingeführte Faktor σ erlaubt eine einfache Berücksichtigung der Rotationsenergie
durch einen Zuschlag zur Masse. Für ganze Züge einschliesslich Triebfahrzeuge kann mit
σ = 1.08 (guter Mittelwert) gerechnet werden. Somit lautet die Formel:
wa = l/g * σ * a * 1000
wobei g=9.81[m/s2], σ=1.08, a=[m/s2], wa=[N/kN]
Übertrageung der Zugkraft durch Adhäsion (Kraftschluss)
Die Zug- bzw. Bremskraft, die ein Rad auf die Schiene überträgt, ist durch die Adhäsion begrenzt. Sie entspricht in erster Annäherung der Haftreibung. Wenn ein durch die Masse m des Fahrzeuges belastetes Rad eine Gewichtskraft Fg aufweist, kann dieses Rad höchstens die folgende Kraft Fh übertragen:
Fh = μ * Fg * cos(β)
Fg * cos(β) ist die rechtwinklig zur Schienenebene wirkende Komponente der Gewichtskraft. Bei den kleinen Neigungswinkeln,
welche im Betrieb der Adhäsionsbahnen in Frage kommen, kann mit hinreichender Genauigkeit der Kosinus durch 1 ersetzt werden.
Der Haftreibungswert beim Kraftschluss:
Für den Haftreibungswert μ0 zwischen Triebrad und Schiene ist bei getriebenem Rad die Abnahme von μ0 mit zunehmender Fahrgeschwindigkeit zu beachten. Bei gebremsten Rad ist der Haftreibungswert weitgehend von der Geschwindigkeit unabhängig.
Die angegebenen Werte für μ0 sind Maximalwerte. Ueberschreitet die Zug- oder Bremskraft am Radumfang den Wert μ*Fg, mit Fg=Adhäsionsgewicht des Fahrzeuges, so tritt Schleudern oder Gleiten der Triebräder ein, dass heisst, das Rad haftet nicht mehr, sondern gleitet über die Schiene. Man spricht dann auch nicht mehr vom Haftreibungswert, sondern vom Gleitreibungswert.
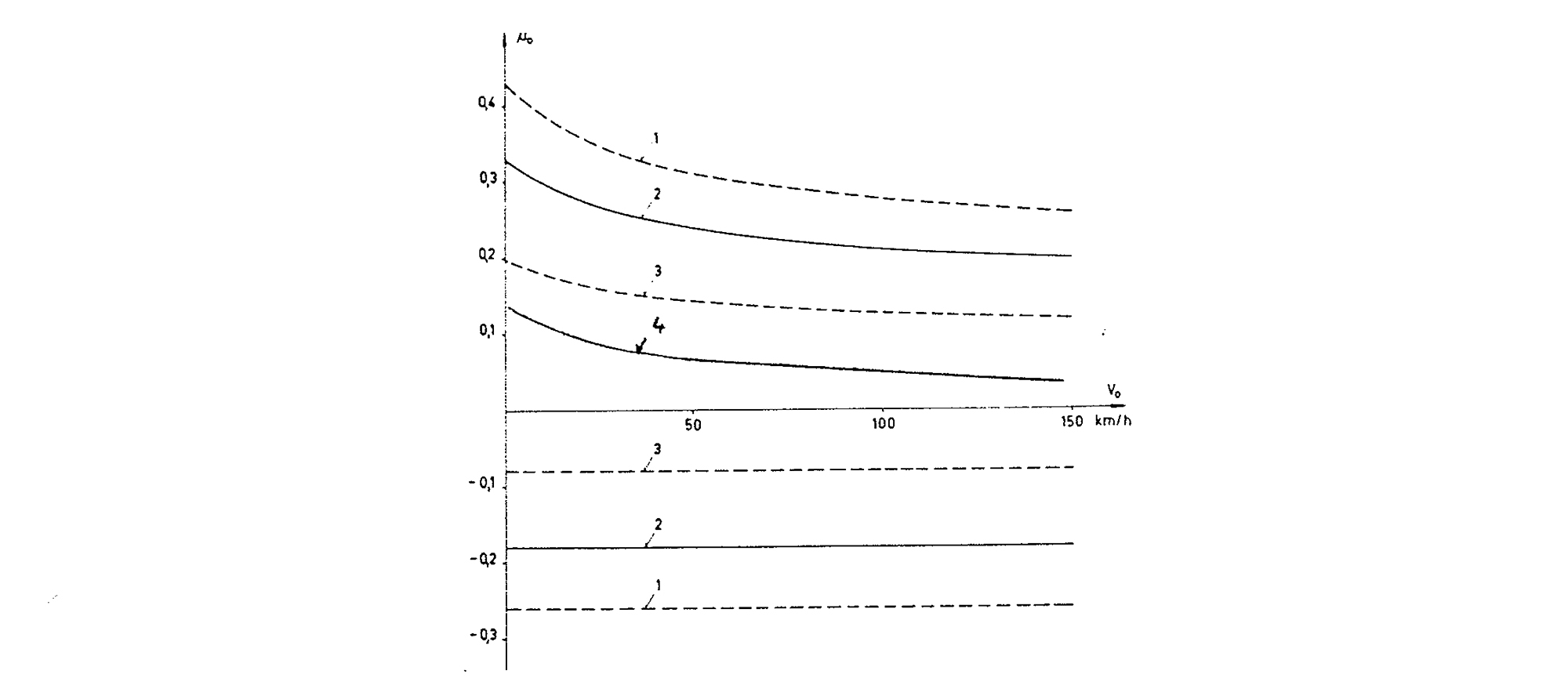 Maximalwert μ0 des Haftreibungswertes zwischen Triebrad und Schiene in Abhängigkeit der Fahrgeschwindigkeit V0.
Werte für getriebenes Rad nach oben, für gebremstes Rad nach unten aufgetragen.
Maximalwert μ0 des Haftreibungswertes zwischen Triebrad und Schiene in Abhängigkeit der Fahrgeschwindigkeit V0.
Werte für getriebenes Rad nach oben, für gebremstes Rad nach unten aufgetragen.1 sehr gute Adhäsionsverhältnisse k=1.6
2 normale Adhäsionsverhältnisse k=1
3 sehr schlechte Adhäsionsverhältnisse k=0.6
4 gleitende Räder
Der mathematische Zusammenhang für das getriebene Rad wurde von Curtius und Kniffler aus seinerzeitigen Versuchen ermittelt und folgendermassen beschrieben:
| 2.083 |
μ0 = k * | ———————————— | + 0.161
| v + 12.22 |
wobei v = [m/s]
Mit der Konstanten k wird den Witterungsverhältnissen Rechnung getragen
k = 1.6 → μ0 bei 0 km/h ist 4.3 (Optimales Wetter)
k = 1 → μ0 bei 0 km/h ist 0.33 (Normales Wetter)
k = 1.6 → μ0 bei 0 km/h ist 0.2 (Schlechtes Wetter)
Die pneumatische Bremse (Druckluft-Bremse)
Die durch den Bremsklotzdruck P am Radreifen entstehende Reibung erzeugt die Kraft P*μk, die am Radumfang tangential angreift
und der Drehrichtung entgegengesetzt ist. Eine gleich grosse Gegenkraft wird zwischen Rad und Schiene erzeugt,
die den Lauf des Fahrzeuges hemmt. Damit die Räder auf den Schienen nicht gleiten, darf die vom Bremsklotz auf das Rad wirkende Reibungskraft P*μk
nie grösser werden, als die vom Rad auf die Schienen übertragene Haftreibungskraft Fg*μ0.
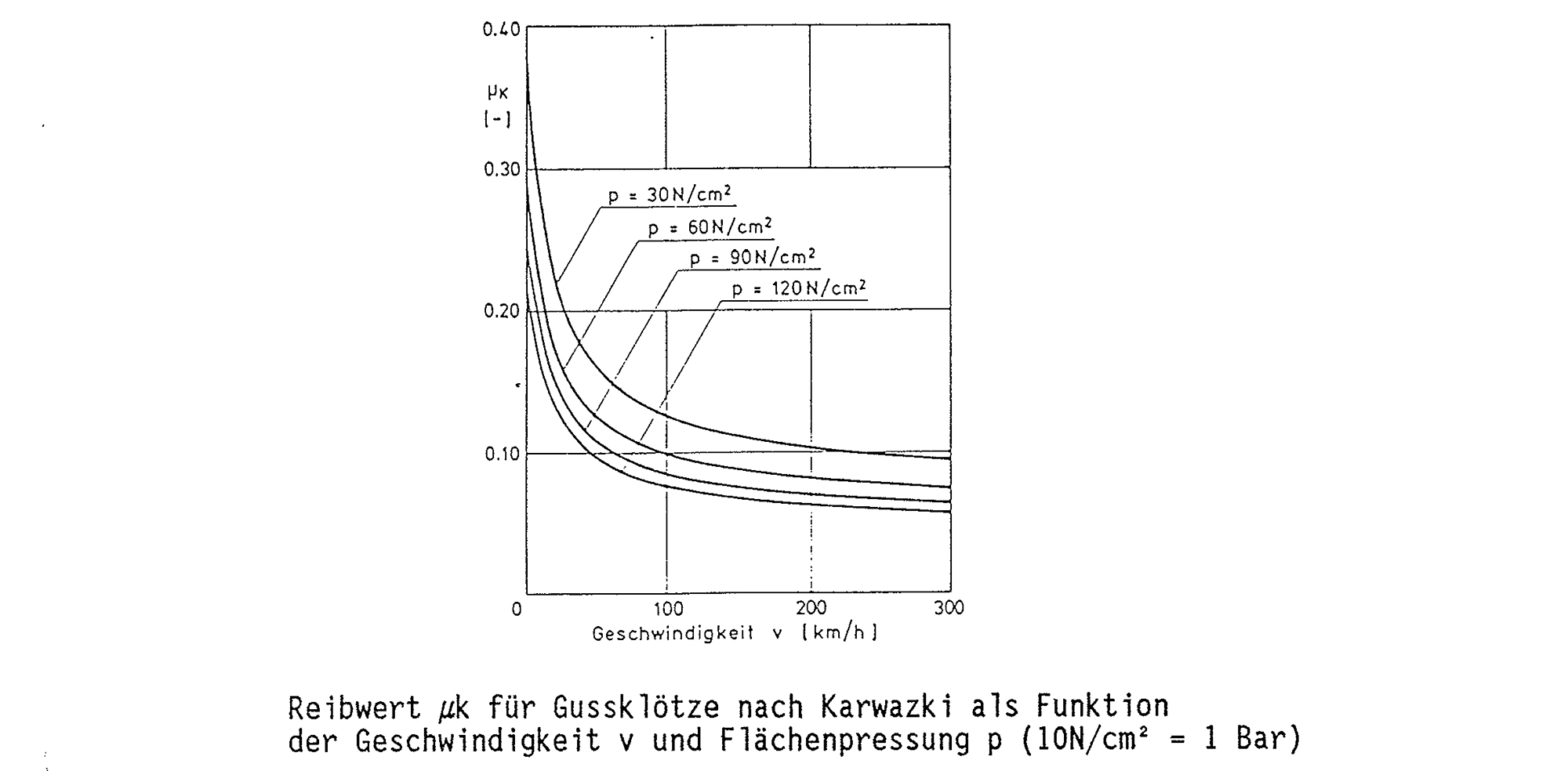
Im Gegensatz zum Haftreibungswert zwischen Rad und Schiene ist der Reibungswert μk zwischen dem Bremsklotz aus Gusseisen und dem Radreifen (Stahl)
von der Geschwindigkeit und Flächenpressung des Klotzes abhängig, und zwar nimmt er sowohl mit zunehmender Geschwindigkeit wie auch bei
grösser werdenden Flächenpressung des Klotzes ab. (Durch diese Eigenschaft wird die volle Ausnützung der Klotzbremse erschwert.)
 Mathematisch formuliert lautet dies:
Mathematisch formuliert lautet dies:
1 + 0.036 * v 1 + 0.0056 * p
μk = 0.6 * ——————————————— * ————————————————
1 + 0.180 * v 1 + 0.0280 * p
wobei v = Geschwindigkeit [m/s]
p = Flächenpressung resp. Bremszylinderdruck [N/cm2]
Die dargestellten Kurven lassen erkennen, dass bei hohen Geschwindigkeiten der Klotzdruck bei Graugussbremsklötzen mit Rücksicht auf den Reibwert
wesentlich höher sein darf als bei niedrigen Geschwindigkeiten, in deren Bereich der Reibungswert μk den Haftreibungswert μ0
sogar übersteigt.Um ein Blockieren der Räder zu verhüten, muss daher im untern Geschwindigkeitsbereich der Klotzdruck begrenzt werden, während er im obern Geschwindigkeitsbereich zur Verstärkung der Bremswirkung zu erhöhen ist. Dies geschieht mit der Bremsumschaltung von RIC auf R, die bewirkt, dass bei R-Bremsung die doppelte Bremskraft auf die Räder wirkt, als bei RIC-Bremsung. Die Umschaltung von RIC- auf R-Bremsung geschieht bei 80 km/h. Zurückgeschaltet auf RIC-Bremsung wird bei 50 km/h. Die Bremsstufe RIC ist in ihrer Wirkung der P-Bremse ähnlich. (Es wird hier aber nur die R-Bremse ausführlich betrachtet.)
Wegen den Materialeigenschaften des Graugusses machen sich Witterungseinflüsse beim Reibungskoeffizienten μk kaum bemerkbar und sind daher zu vernachlässigen.
Der Zusammenhang : Hautleitungsdruck → Bremsdruck → Bremskraft
Der Hauptleitungsdruck beträgt vor Betätigung der Bremsen 5 Bar. Der Höchstdruck im Bremszylinder wird bei einer Druckabsenkung in der Hauptleitung auf 3.5 Bar erreicht.
Der Hauptleitungdruck ist annähernd proportional zum Bremszylinderdruck, wobei die Hysterese zwischen «Bremse anziehen» und «Bremse lösen» vernachlässigt werden kann.
Die mathematische Formulierung:
y = -2.89 * x + 14.01 wobei x → Hauptleitungsdruck [Bar]
y → Bremszylinderdruck [Bar]
Auch der Zusammenhang Bremsdruck zu Bremskraft ist proportional. Maximaler Bremsdruck ergibt maximale Bremskraft. Um aber eine Aussage über die maximale Bremskraft
zu machen, muss die Abbremsung bekannt sein.Die Abbremsung
Mit Abbremsung wird das Verhältnis zwischen Klotzdruck und Radlast bezeichnet. Für Geschwindigkeiten unter 50 km/h (RTC-Bremsung) wurde die Abbremsung auf ungefähr 80% festgelegt. Diese Abbremsung bezieht sich auf die Anwendung der vollen Bremskraft (Schnellbremsung) für Fahrzeuge mit gusseisernen Bremsklötzen und Radreifen aus Stahl. Für Geschwindigkeiten über 80 km/h (R-Bremsung) sind dagegen Abbremsungen bis 160% und mehr zulässig.
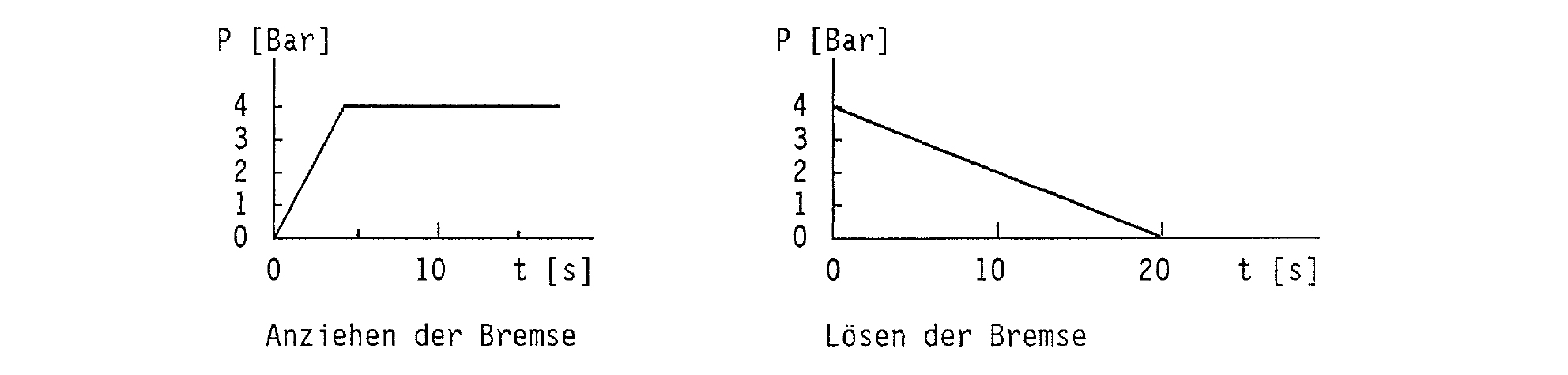
Druckauf- und Abbau im Bremszylinder
Die über den Druckabfall in der Hauptleitung gewählte Bremskraft liegt nicht sofort an den Rädern an, sondern baut sich kontinuierlich auf. Wobei der Druck linear auf- und abgebaut wird.
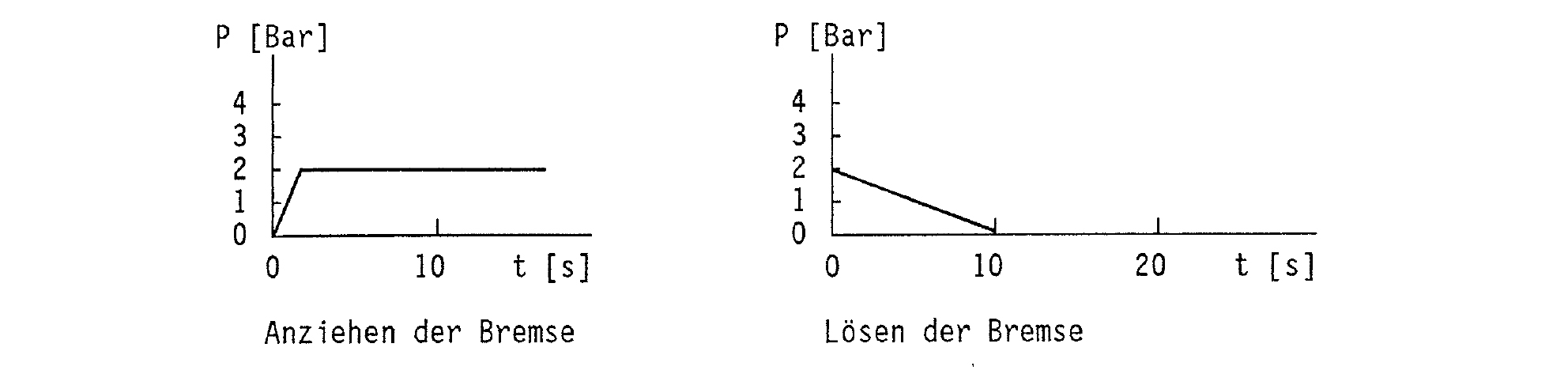
Bremsen mit hohem Druck v > 80 km/h (R-Bremsung):
Bremsen mit kleiner Druckstufe v < 50 km/h (RIC-Bremsung):
Man kann demnach folgendes formulieren:
- Druckaufbau in beiden Druckstufen: 1.0 Bar pro Sekunde
- Druckabbau in beiden Druckstufen: 0.2 Bar pro Sekunde
- Umschaltung Hoch/Niederdruckstufe: 1.0 Bar pro Sekunde (Druck wird auf die Hälfte reduziert.)
2.9 Visualisierung → Oberleitungen zeichnen
Um den Fahreffekt der Lokomotive zu visualisieren, wird die Sicht aus dem Führerstand gezeigt. Das Gleisbild soll dabei statisch sein und die
Oberleitungsmasten in Funktion der Zeit sich der Lokomnotive nähern.
Der Grund, warum das Gleis statisch bleibt, ist der, dass man schon bei kleinen Geschwindigkeiten den Schienenstrang nur noch als zwei Linien wahrnimmt,
die am Horizont zusammenlaufen.
Die Bewegung der Oberleitungsmasten die eine mittlere Entfernung von 60 Metern (von Mast zu Mast) haben, wird dargestellt.
Es werden aber nicht unendlich viele Masten gezeigt, sondern nur deren fünf.
Der erste Mast ist stationär in 240 Meter Entfernung zur Lokomotive. Die weiteren vier Masten verteilen sich im Abstand von je 60 Metern bis zur Lokomotive.
Wenn die Lokomotive in Gang gesetzt wird, bewegen sich nun die vier Masten ihr entgegen. Sobald ein Mast die Lokomotive passiert hat,
wird er in 240 Meter Entfernung neu gesetzt. Der fünfte Mast bleibt bei 240 Metern stehen und vermittelt so den Eindruch eines am Horizont verschwindenden
Masten-Tunnels. Die Schwierigkeit besteht nun in der zweidimensionalen Abbildung der Masten, die untereinander im dreidimensionalen Raum ja einen konstanten Abstand haben.
Das Gesetzt der Proportionalität zeigt, dass der vertikale Abstand der Fusspunkte der Masten sich gegen das Zentrum (Fluchtpunkt) immer wieder halbiert.
Dazu zwei Skizzen: (Ansicht von oben und Ansicht von vorne)
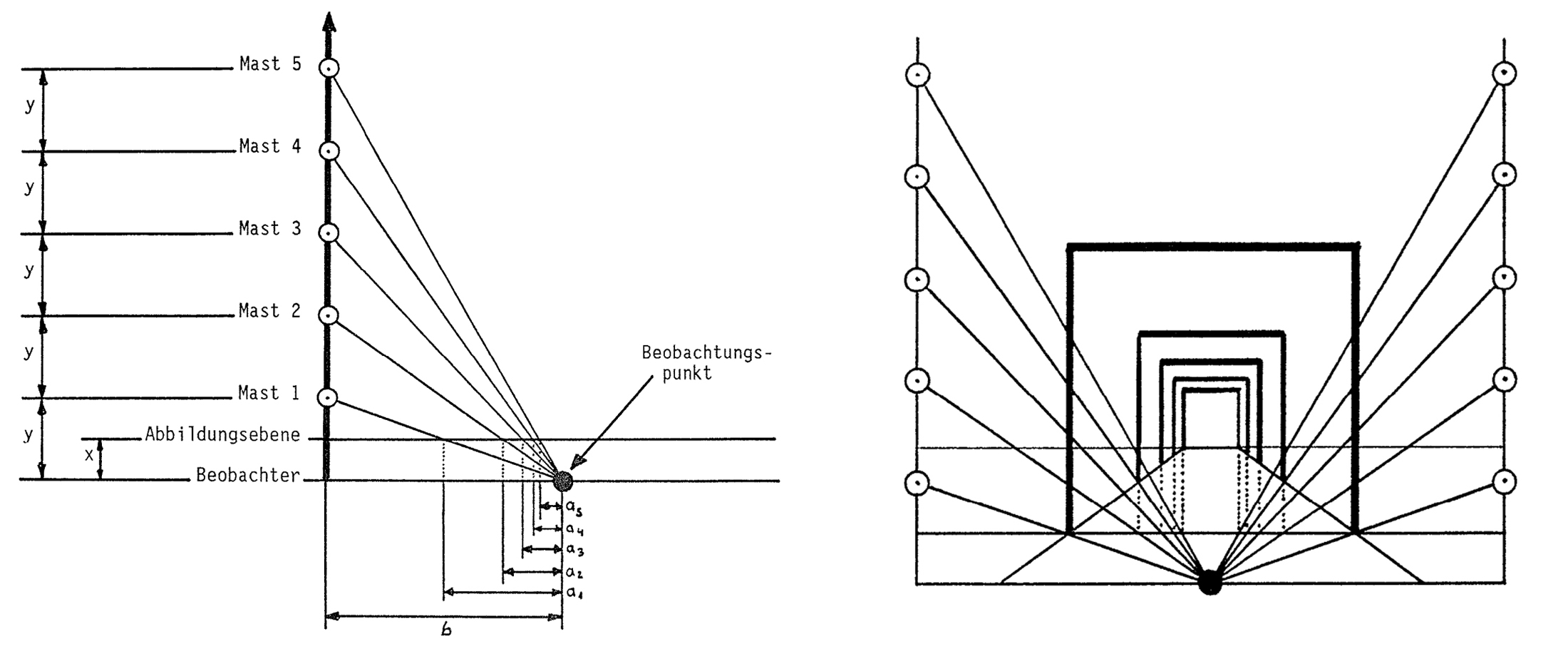
Es gilt für Mastn:
n * y x b * x
——————— = ——— oder an = ————————
b an n * y
Es sei nun x=y/2 Somit gilt nun für Mastn:
b
———————
2 * n
Dies ergibt für n = 1..5
a1=b/2 , a2=b/4 , a3=b/6 , a4=b/8, a5=bl0
Dies ist eine "1/2n"-Funktion. Um die Tiefenwirkung besser hervorzuheben, wird nun aber eine "1/2n"-Funktion angewendet.
Damit bewegen sich die Oberleitungen in den hinteren Regionen nicht so schnell wie bei der "1/2n"-Funktion, ausserdem trifft es nun zu,
dass sich der vertikale Abstand der Fusspunkte der Masten gegen das Zentrum (Fluchtpunkt) immer wieder halbiert.Dies ergibt für n = 1..5 : a1=b/2 , a2=b/4 , a3=b/8 , a4=b/16 , a5=b/32
Somit ist auch der Bereich von n=0 bis n=1 gelöst weil 1/20=1 ergibt was bei 1/2n unendlich wäre.
3. Dataflow-Diagram
3.1 Context-Diagramm
3.2 Zugfahrt simulieren
3.3 Standort ermitteln
3.4 Elektrisch betreiben
3.5 Pneumatisch betreiben
3.6 Fahrwiderstand berechnen
3.7 Schnellbremsung einleiten
3.8 Bremse auslösen
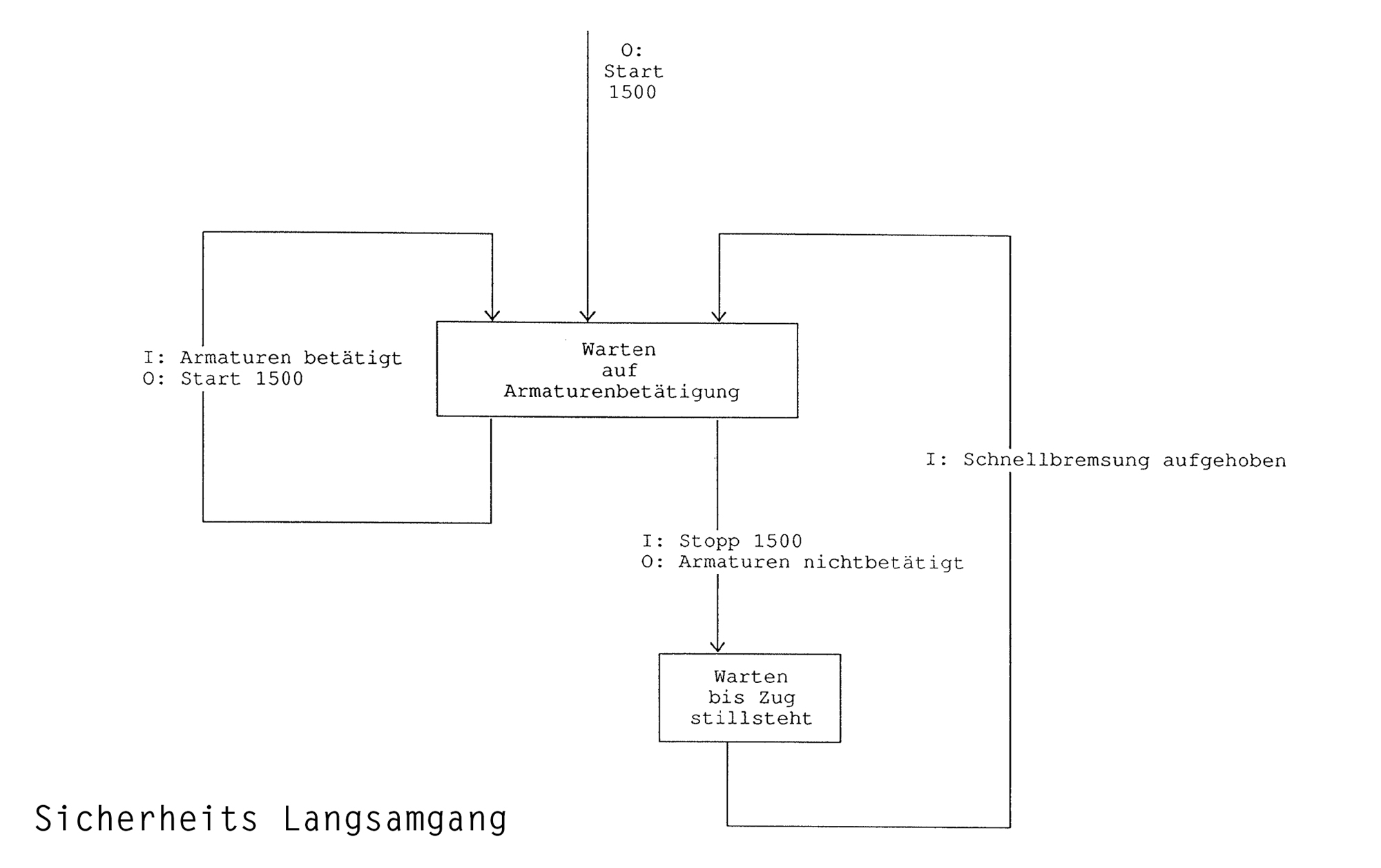
3.9 Sicherheits Langsamgang
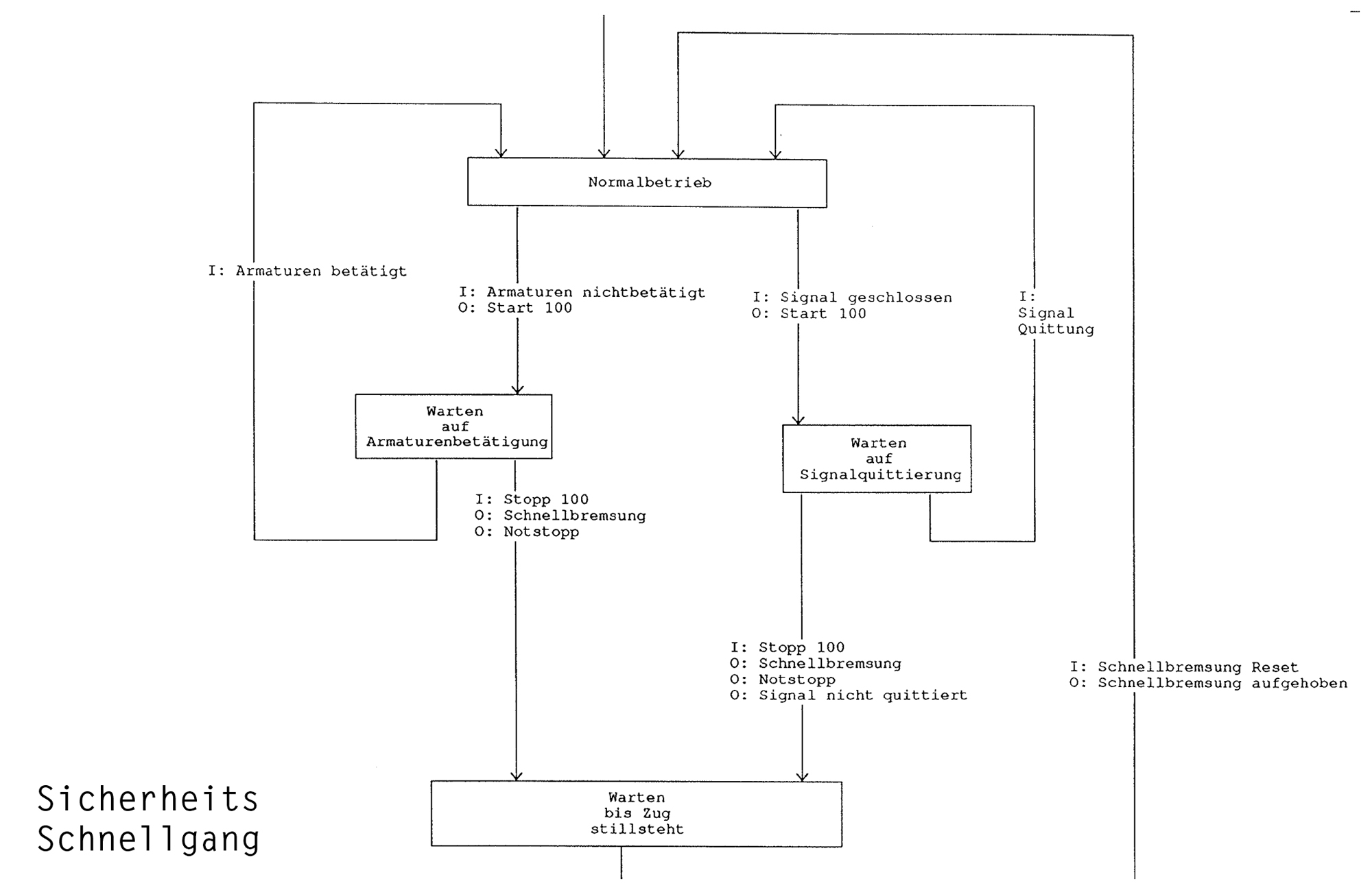
3.10 Sicherheits Schnellgang
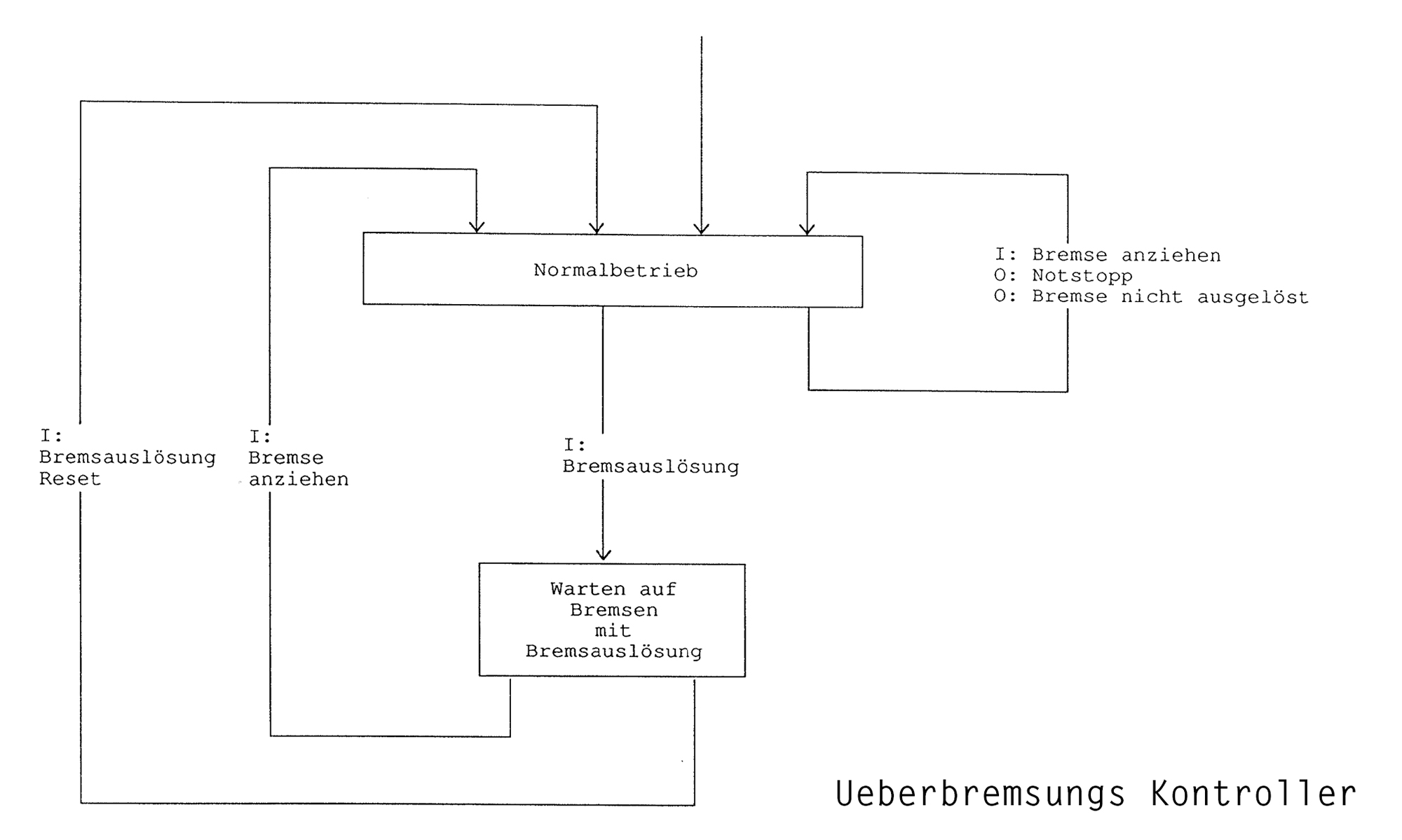
3.11 Ueberbremsungs Kontroller
4. Data-Dictionary
Context Diagramm
Datenflüsse
———————————
Bremshebel HL_Druck
Fahrschalter Fahrschalterbereich
Anzeigegeräte Fahrgeschwindigkeit + HL_Druck + Motorstrom + Schleuderwarnung
Virtuelle_Signale Neigung + Eff_Signalentf + Signal
Fahrszenario_Wahl Fahrszenario_Nr
Fahrszenario l{Kilometerstein + Streckenaenderung}n
Kurvenradius Kurve
Geschwindigkeit Fahrgeschwindigkeit
Signaleinhaltung Fahrgeschwindigkeit + Begriff
Fahrstrecke Fahrszenario_Nr
Adhäsion Haftreibung
Zuglänge Wagenanzahl
Bremsvermögen Abbremsung
Wagendimensionen Gewicht + Laenge
Level-0-Diagramm
Datenflüsse
———————————
Adhäsion Haftreibung
Fahrschalter Fahrschalterbereich
Schleudern Schleuderwarnung
Ampere Motorstrom
Geschwindigkeit Fahrgeschwindigkeit
Triebkraft Zugkraft
Strecke '0.000' .. '10.000'
Bremshebel HL_Druck
Wagendimensionen Gewicht + Laenge
Bremsvermögen Abbremsung
Zuglänge Wagenanzahl
Gesamtbremskraft Zugkraft
Kurvenradius Kurve
Fahrwiderstand Zugkraft
Neigungspromille Neigung
Fahrszenario l{Kilometerstein + Streckenaenderung}n
Virtuelle_Signale Neigung + Eff_Signalentf + Signal
Signaleinhaltung Fahrgeschwindigkeit + Begriff
Level-1-Diagramm
Datenflüsse
———————————
Geschwindigkeit Fahrgeschwindigkeit
Triebkraft Zugkraft
Gesamtbremskraft Zugkraft
Fahrwiderstand Zugkraft
Strecke '0.000' .. '10.000'
Lichtsignal Signalentf + Signal
Neigungspromille Neigung
Kurvenradius Kurve
Fahrszenario l{Kilometerstein + Streckenaenderung)n
Signalabstand Eff_Signalentf
Signaleinhaltung Fahrgeschwindigkeit + Begriff
Level-2-Diagramm
Datenflüsse ——————————— Fahrschalter Fahrschalterbereich Zuschaltstrom [3100|2400|-1750|-2250] Fahrstufenkorrektur '-54' .. +54' Fahrstufe '-22' .. '+32' Schleudern Schleuderwarnung Ampere Motorstrom Adhäsion Haftreibung Triebkraft Zugkraft Motorenkraft Zugkraft
Level-3-Diagramm
Datenflüsse ——————————— Bremshebel HL_Druck Bremsvermögen Abbremsung Geschwindigkeit Fahrgeschwindigkeit Klotzkraft Zugkraft Adhäsion Haftreibung Wagengewicht Gewicht Wagenbremskraft Zugkraft Zuglänge Wagenanzahl Wagenlaenge Laenge Totzeit '0.0' .. '2.0' *Bremsreaktionszeit in Sekunden* Gesamtbremskraft Zugkraft
Datenflusselemente
HL_Druck '3.5' .. '5.0' *Hauptleitungsdruck in Bar* Fahrschalterbereich [F++|F+|M|F.|F-|0|B-|B.|B+] Fahrgeschwindigkeit '0.0' .. '44.4' *in Meter/Sekunde (0..160km/h)* Motorstrom '0' .. '4000' *1 von 6 Motoren, in Ampere* Signalpanel Neigung + Eff_Signalentf + Signal Neigung '-27' .. '+27' *Neigung in Promille* Eff_Signalentf '0' .. '1000' *Meter* Fahrszenario_Nr 'l' .. 'n' *Von SBB angebotene Streckenauswahl* Kilometerstein '0.001' .. '10.000' *Streckenkilometer ab Start* Streckenaenderung [Kurve|Neigung|Signalentf + Signal] Signalentf '500' .. '1000' *Sichtweite zum Signal in Meter* Signal Signaltyp + Begriff Signaltyp [Vorsignal|Hauptsignal] Begriff [Halt|Fahrbegiff1|Fahrbegiff2|Fahrbegiff3] Kurve '0' .. '1000' *Radius in Meter Haftreibung '0.6' .. '1.6' *Dies ist nicht μ0!* Wagenanzahl '1' .. '24' Abbremsung '0.8' .. '2.0' *Klotzdruck zu Radlast* Gewicht '200' .. '400' *Wagengewichtskraft in kN* Laenge '10' .. '30' *Wagenlaenge in Meter* Zugkraft '-400' .. '400' *Bremsen bis Antreiben in kN*
5. Process-Specifications
Prozess 1.1 "Geschwindigkeit überwachen"
In Lichtsignal (= Signalentf + Begriff)
In Geschwindigkeit
Akt Sobald ein Lichtsignal angekündigt wird, soll mittels der Geschwindigkeit,
die über die Zeit integriert die Strecke ergibt, festgestellt werden, wann das Signal passiert wird.
In/Out Signalabstand = Tatsächlicher (dekrementierter) Abstand zum Signal.
Akt Zusätzlich wird noch überprüft, ob der Fahrbefehl (Geschwindigkeit)
beim passieren des Signals eingehalten wird.
Out Signaleinhaltung
Prozess 1.2 "Fahrweg rechnen"
In Triebkraft
In Gesamtbremskraft
In Fahrwiderstand
Akt Alle diese Kräfte unter Berücksichtigung der Vorzeichen summiert, ergibt die resultierende Kraft.
Diese einmal über die Zeit integriert, ergibt die Geschwindigkeit zum Zeitpunkt t
Out Geschwindigkeit
Akt Diese Geschwindigkeit nochmals über die Zeit integriert, ergibt die zurückgelegte Strecke.
Out Strecke
Prozess 1.3 "Strecke vergleichen"
In Fahrszenario (=Kilometerstein+ [Kurve|Neigung|Signalentf + Signal])
In Strecke
Akt Es wird überprüft, ob das Fahrszenario an dem soeben passierten Streckenkilometer Strecke ein Kilometerstein
mit entsprechendem Ereignis aufweist. Sollte dies der Fall sein, so wird das Ereignis an die entsprechenden Prozesse weitergeleitet.
Out Lichtsignal
Out Kurvenradius
Out Neigungspromille
Prozess 2.1 "Fahrstufe aufschalten"
In Fahrschalter (= [F++|F+|M|F.|F-|0|B-|B.|B+])
Akt Anmerkung: El. Fahren : Stufe +l bis +32
El. Bremsen: Stufe -1 bis -22
F++ +3 Stufen/sec bis I=2150A, dann +1 Stufe/sec bis I=3100A
F+ +3 Stufen/sec bis I=2150A, dann +1 Stufe/sec bis I=2400A
M+ 1 Stufe/sec bis !=2400 A
F. Stufe unverändert
F- Falls Stufe >0: -1 Stufe/sec bis I=2150A, dann -3 Stufen/sec bis Stufe=0
0 Stufe = 0
B- Falls Stufe <0: +1 Stufe/sec bis I=-1750A, dann +3 Stufen/sec bis Stufe=0
B. Stufe unverändert
B+ -3 Stufen/sec. bis I=-1750A, dann -1 Stufe/sec bis I=-2250A
Out Fahrstufe
In Notstopp
Akt Notstopp hat absolute Priorität. Ist Notstopp=l wird Fahrstufe=0 (Zwangsabschaltung der Fahrmotoren).
Erst wenn Notstopp=0, kann wieder über den Fahrschalter eine Fahrstufe gewählt werden.
In Fahrstufenkorrektur
Akt Ist die Fahrstufe einmal auf den geforderten Zuschaltstrom aufgeschaltet worden, soll dieser Lastunabhängig gleich bleiben.
Dazu der Prozess Motor regeln. Dieser bestimmt, wann eine Fahrstufe zu- oder wegegschaltet werden muss.
In Fahrstufenkorrektur
Out Zuschaltstrom
Akt Damit der Prozess "Motor regeln" weiss, welcher Zuschaltstrom nun eingehalten werden muss,
wird ihm das mittels Zuschaltstrom mitgeteilt.
Prozess 2.2 "Motorenkraft ermitteln"
In Fahrstufe In Geschwindigkeit Akt Es wird mittels der Fahrstufe und der Geschwindigkeit die Motorenkraft und der Motorenstrom berechnet. Out Motorenkraft Out Ampere
Prozess 2.3 "Motor regeln"
In Zuschaltstrom
In Ampere
In Schleudern
Akt Dieser Prozess vergleicht mit Ampere, ob der Zuschaltstrom schon erreicht worden ist,
und wenn dies der Fall ist, versucht er, diesen auszuregeln.
Falls der Prozess "Kraftschluss beurteilen" feststellt, dass die Triebräder schleudern, wird verursacht,
dass eine Fahrstufe zurückgeschaltet wird.
Out Fahrstufenkorrektur
Prozess 2.4 "Kraftschluss beurteilen"
In Motorenkraft
In Adhäsion
In Geschwindigkeit
In Adhäsion
Akt Es wird überprüft, ob das Lokomotivengewicht (Fg=ll77kN) die Motorenkraft bei einer
durch die Geschwindigkeit und Adhäsion gegebenen Reibung auf die Schiene übertragen kann.
Falls dies der Fall ist, wird die ganze Motorenkraft in Triebkraft umgewandelt.
Falls die Triebräder nicht haften, kommt ein kleinere Reibwert zur Anwendung.
Die Triebkraft ist nun nicht mehr der Motorenkraft identisch, sondern wird auf die Kraft reduziert,
die die Lok bei gleitenden Rädern noch übertragen kann.
Dazu wird dem Lokomotivführer eine Schleuderwarnung angezeigt und die Motoren müssen
zurückgeregelt werden.
Out Schleudern
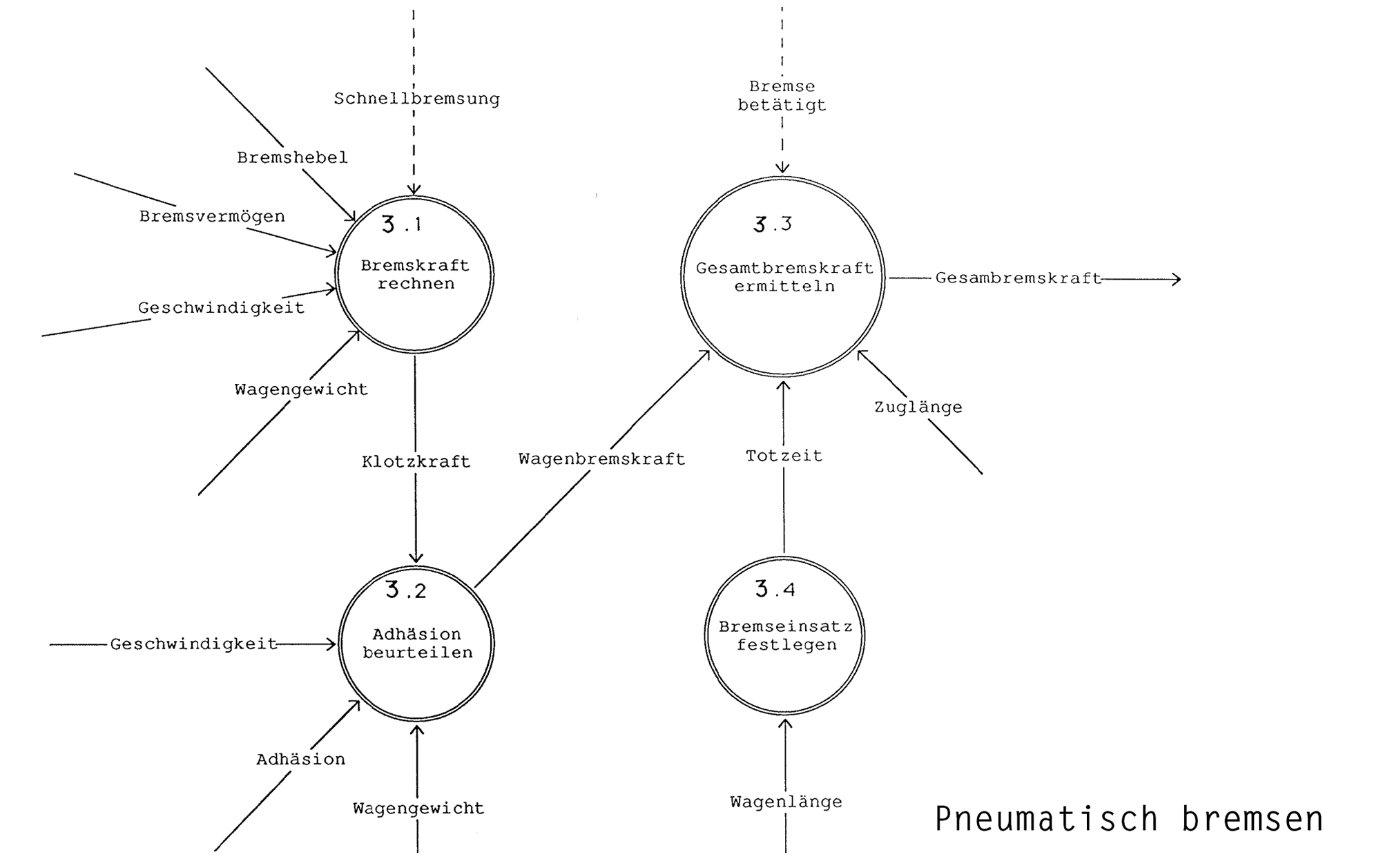
Prozess 3.1 "Bremskraft rechnen"
In Bremsvermögen
In Wagengewicht
Akt Mit Bremsvermögen und Wagengewicht wird die maximale Klotzkraft (alle Bremsklötze am Wagen zusammengefasst)
ermittelt. Multiplikation.
In Bremshebel (= 5.0 bis 3.5 Bar)
Akt Je nach Stellung des Bremshebels kommt nur ein Teil der möglichen Klotzkraft zur Anwendung.
In Geschwindigkeit
Akt Bei Geschwindigkeit >80 km/h (entspricht 22.22 m/s) wird die Bremskraft verdoppelt.
Fällt die Geschwindigkeit unter 50 km/h (entspricht 13.89 m/s) zurück,
wird die Bremskraft wieder auf den einfachen Wert zurückgestellt.
Die Bremskraft erreicht nicht sofort den Endwert. Der Bremsdruck baut sich allmählich auf.
Out Klotzkraft
In Schnellbremsung
Akt Schnellbremsung hat absolute Priorität. Ist Schnellbremsung=l, wird Bremshebel auf 3.5 Bar gestellt.
Erst wenn Schnellbremsung=0, kann über Bremshebel wieder eine Bremsstufe gewählt werden.
Prozess 3.2 "Adhäsion beurteilen"
In Klotzkraft
In Geschwindigkeit
In Adhäsion
In Wagengewicht
Akt Es wird überprüft, ob das Wagengewicht die Klotzkraft bei einer durch die Geschwindigkeit
und Adhäsion gegebenen Reibung auf die Schiene übertragen kann.
Falls dies der Fall ist, wird die ganze Klotzkraft in Wagenbremskraft umgewandelt.
Falls die Wagenräder nicht haften, kommt ein kleinere Reibwert zur Anwendung.
Die Wagenbremskraft ist nun nicht mehr der Klotzkraft identisch, sondern wird auf die Kraft reduziert,
die der Wagen bei gleitenden Rädern noch übertragen kann.
Out Wagenbremskraft
Prozess 3.3 "Gesamtbremskraft ermitteln"
In Wagenbremskraft
In Totzeit
Akt Dieser Prozess ermittelt die gesammte Bremskraft des Zuges. Dem Umstand der Durchschlagzeit wird dabei
Rechnung getragen. Die Totzeit ist die Zeit die verstreicht, bis sich das Bremsereignis vom einen Wagen
auf den nächsten fortgepflanzt hat. Sobald Bremse_betätigt, beginnt sich die Gesammtbremskraft
durch Zuschalten von Wagenbremskräften im Takt der Totzeit aufzubauen.
Dieser Vorgang ist beendet, wenn alle Bremsen am Zug angesprochen haben resp. wenn "Zuglänge" mal
eine Wagenbremskraft aufaddiert wurde.
Out Gesamtbremskraft
Prozess 3.4 "Bremseinsatz festlegen"
In Wagenlänge
In Zuglänge
Akt Bei einer bekannten Durchschlagzeit wird berechnet, wieviel Zeit benötigt wird,
um ein Bremsereignis an den nächsten Wagen weiterzugeben.
Out Totzeit
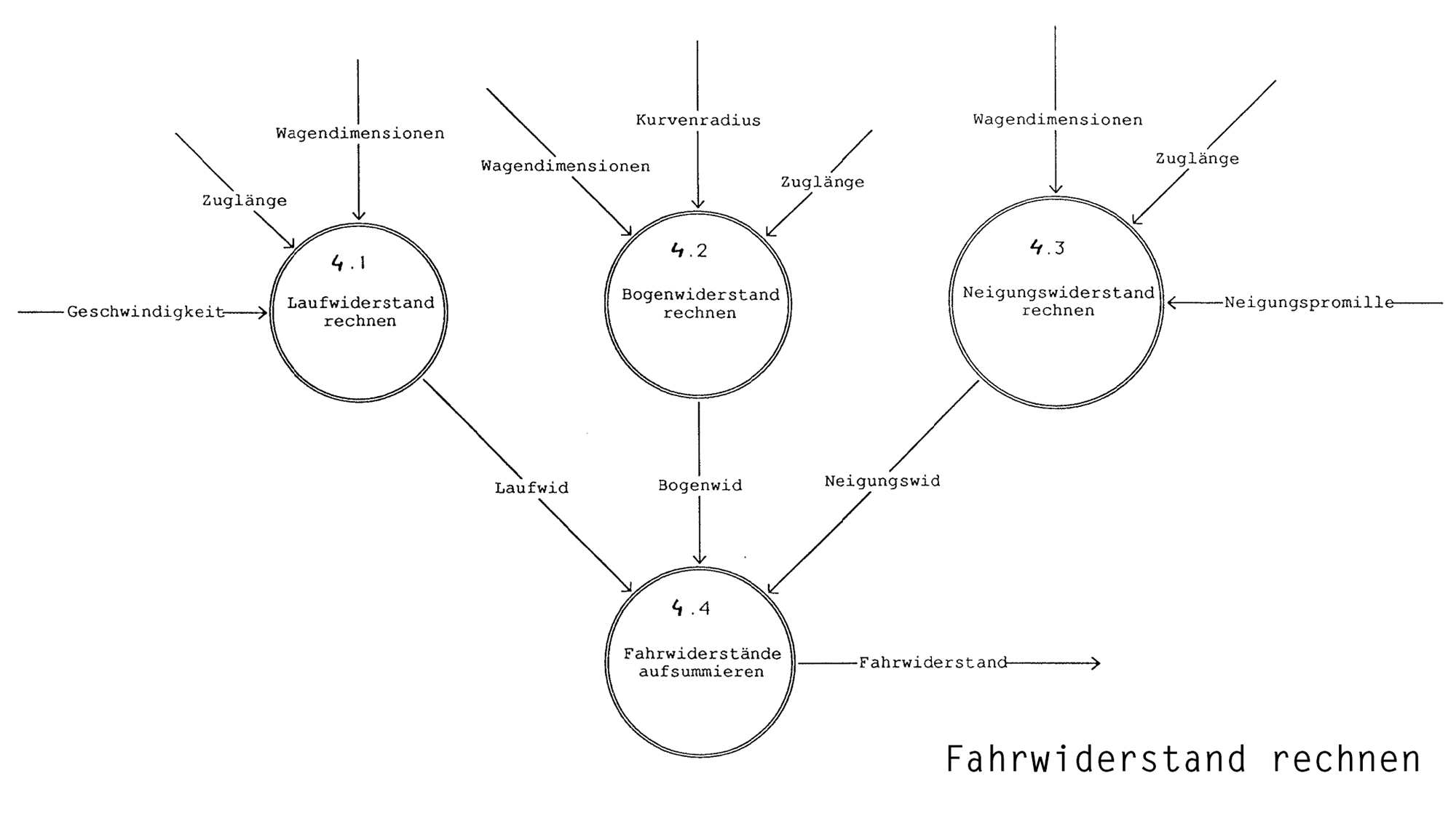
Prozess 4.1 "Laufwiderstand rechnen"
In Zuglänge
In Wagendimensionen
Akt Mit Zuglänge und Wagendimensionen wird die Gewichtskraft des Zuges ermittelt
In Geschwindigkeit
Akt Mit der Geschwindigkeit bestimmt man den spezifischen Laufwiderstand.
Dieser multipliziert mit der Zug-Gewichtskraft ergibt den Laufwiderstand
Out Laufwid
Prozess 4.2 "Bogenwiderstand rechnen"
In Zuglänge
In Wagendimensionen
Akt Mit Zuglänge und Wagendimensionen wird die Gewichtskraft des Zuges ermittelt,
wobei berücksichtigt werden muss, welcher Teil des Zuges zum Zeitpunkt t in die
Bogenrechnung involviert ist. zB. Einfahrt des Zuges in eine Kurve.
In Kurvenradius
Akt Mit dem Kurvenradius bestimmt man den spezifischen Bogenwiderstand.
Dieser multipliziert mit der Zug-Gewichtskraft ergibt den Bogenwiderstand.
Out Bogenwid
Prozess 4.3 "Neigungswiderstand rechnen"
In Zuglänge
In Wagendimensionen
Akt Mit Zuglänge und Wagendimensionen wird die Gewichtskraft des Zuges ermittelt,
wobei berücksichtigt werden muss, welcher Teil des Zuges zum Zeitpunkt t in die
Steigung/Ebene/Gefälle involviert ist.
zB. Einfahrt des Zuges in eine Steigung/Ebene/Gefälle !
In Neigungspromille
Akt Mit Neigungspromille bestimmt man den spezifischen Neigungswiderstand.
Dieser multipliziert mit der Zug-Gewichtskraft ergibt den Neigungswiderstand.
Out Neigungswid
Prozess 4.4 "Fahrwiderstände aufsummieren"
In Laufwid In Bogenwid In Neigungswid Akt Alle zusammengezählt ergibt den Fahrwiderstand Out Fahrwiderstand
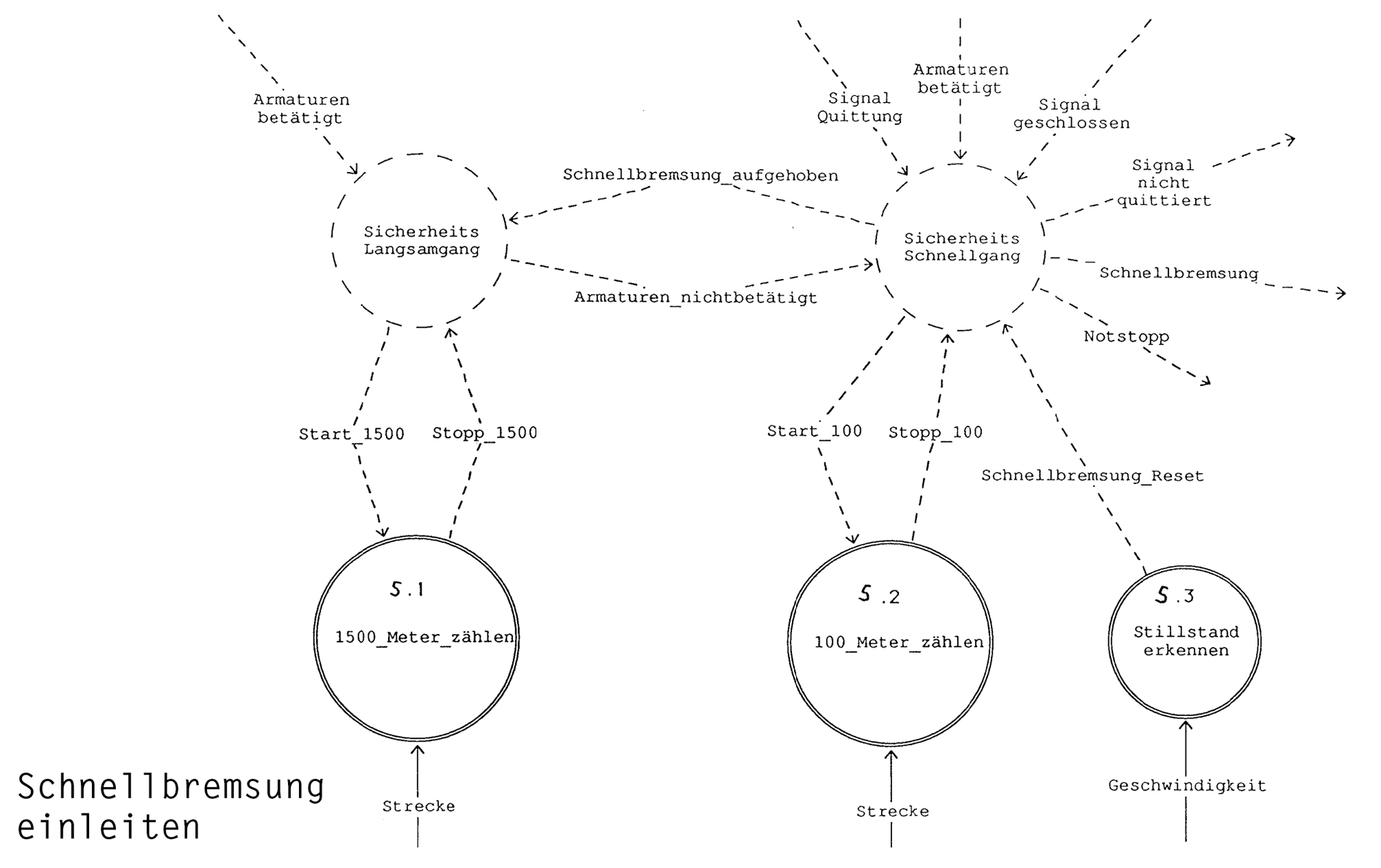
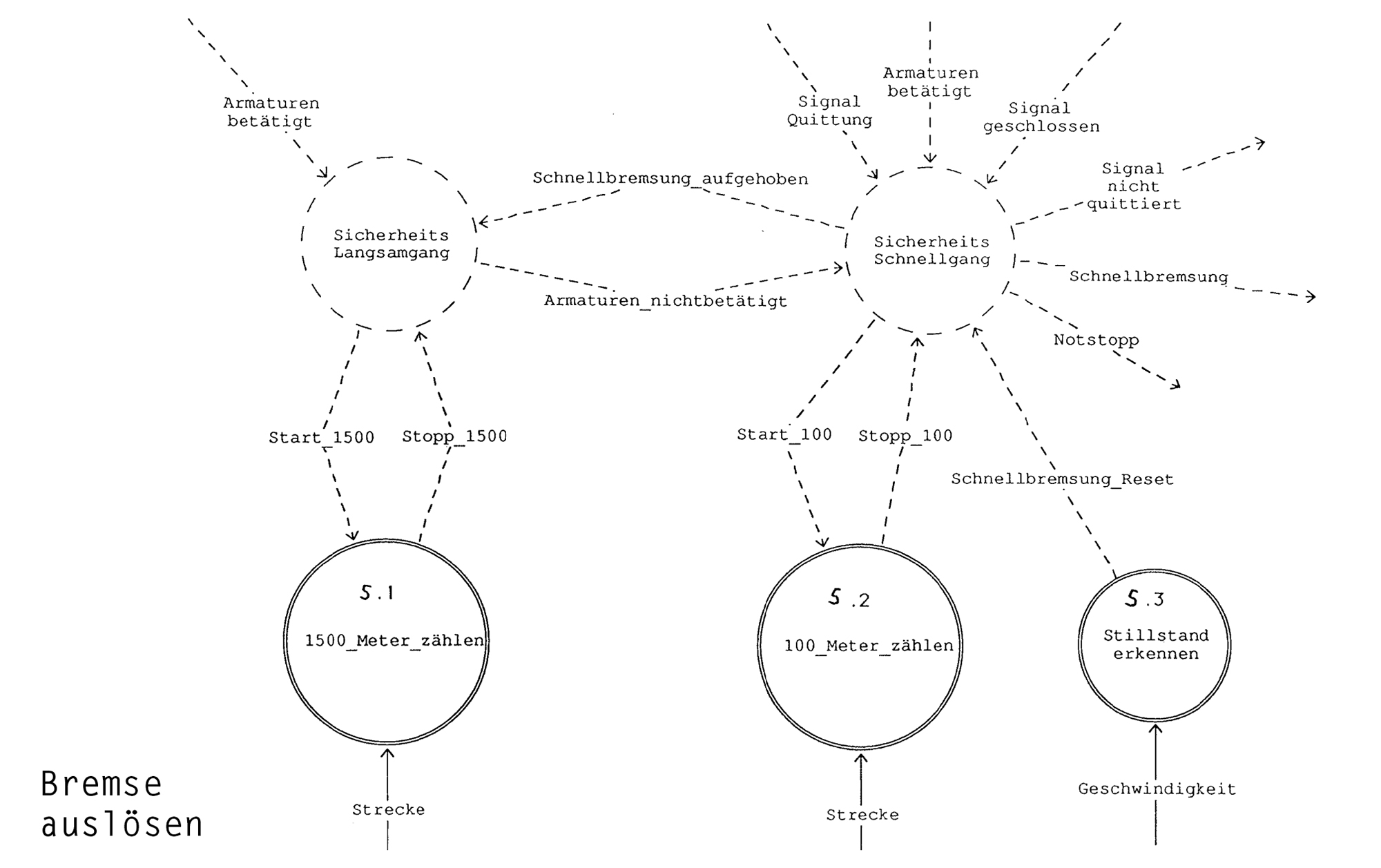
Prozess 5.1 "1500 Meter zählen"
In Strecke
Akt Bei Start 1500 wird der aktuelle Strecken-Wert in Beginn_Strecke gespeichert.
Sobald Beginn_Strecke + 1500 < Strecke erfüllt ist, wird Stoppl500 generiert.
Prozess 5.2 "100 Meter zählen"
In Strecke
Akt Bei Start 100 wird der aktuelle Strecken-Wert in Beginn_Strecke gespeichert.
Sobald Beginn_Strecke + 100 < Strecke erfüllt ist, wird StopplOO generiert.
Prozess 5.3 "Stillstand erkennen"
In Geschwindigkeit Akt Sobald Geschwindigkeit = 0, wird Schnellbremsung_Reset generiert.
Prozess 6.1 "Bremsstufe feststellen"
In Bremshebel Akt Wenn Bremshebel ≠ 5 Bar wird Bremse_anziehen generiert.
6. Programmier-Modulaufteilung
Jedes Modul (TOL) und auch das Hauptprogramm benutzen die Commen-Types aus dem COMM_TYP.TOL.
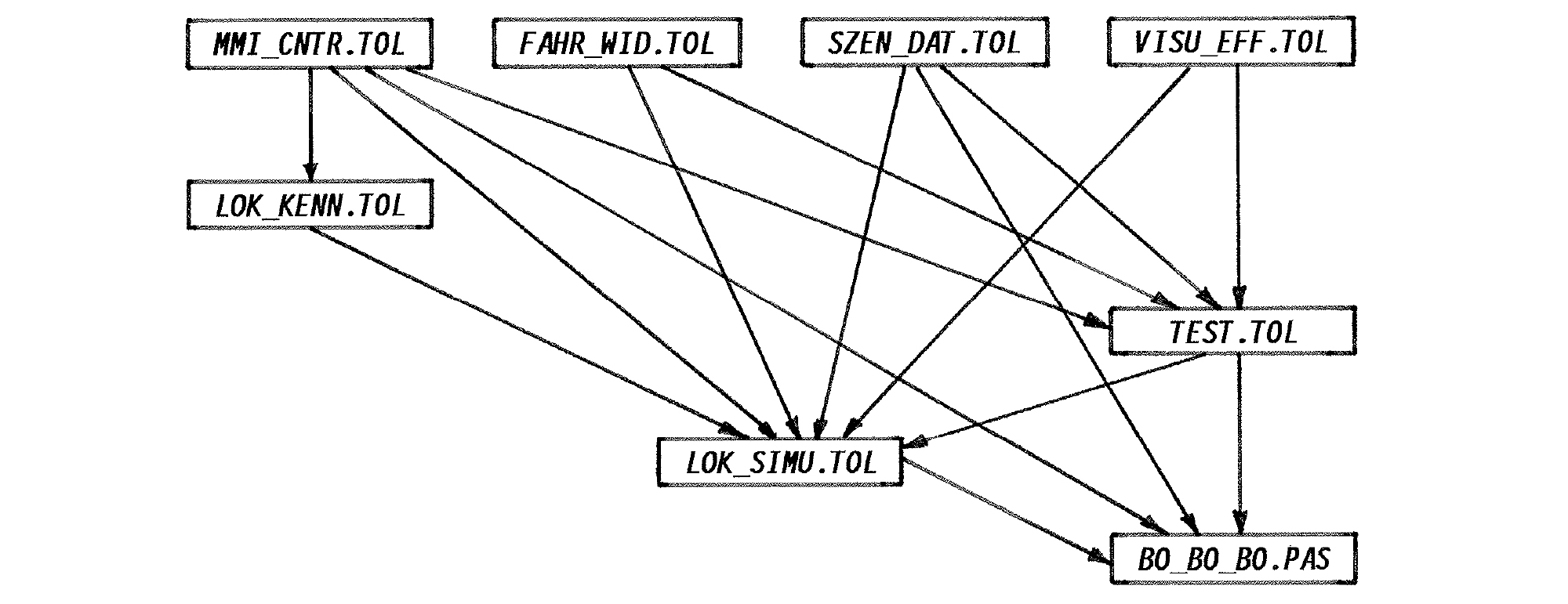
- FAHR_WID.TOL: Zusammenfassen aller Kräfte die der Fahrtrichtung entgegengesetzte Wirkung haben (ausser Rekuperieren), wie...
• Laufwiderstand
• Bogenwiderstand
• Neigungswiderstand
• Pmeumatisches Bremsen - MMI_CNTR.TOL: Eingabeinterface und Routinen zur Erfassung der Randbedingungen vor dem Start der Simulation.
Akustische Ausgabe. - SZEN_DAT.TOL: Funktionale und prozedurale Zugriffe auf Szenario-Daten gemäss Hidden-Data-Concept. Auf- und Abbau einer verketteten Liste mit Wegelementen.
- VISU_EFF.TOL: Alles was man während der Simulation auf dem Ausgabemedium sieht, wird in diesem Modul aufbereitet.
- LOK_KENN.TOL: Modellierung des elektrischen Teils der Lokomotive wie...
• Fahrmotoren
• Fahrstufenschalter
• Motorenstrom-Regelung
Benötigt auch Teile des MMI_CNTR.TOL um akustisch auf spezielle Ereignisse hinzuweisen. - TEST.TOL: Modul zum Testen der einzelnen Module wie...
• MMI_CNTR.TOL (Randbedingungen richtig setzen)
• SZEN_DAT.TOL (Liste richtig behandeln)
• VISU_EFF.TOL (Anzeige der Instrumente)
• FAHR_WID.TOL (Plausibilitäts-Check der Bremse) - LOK_SIMU.TOL: Vereinigung aller Module und "Motor" der Simulation.
- BO_BO_BO.PAS: Oberste Ebene "MAIN". Wenn gewisse Randbedingungen nicht gesetzt sind, wird die eigentliche Simulation nicht durchlaufen.
7. Nassi-Shneidermann-Diagramme
Randbedingungen setzen
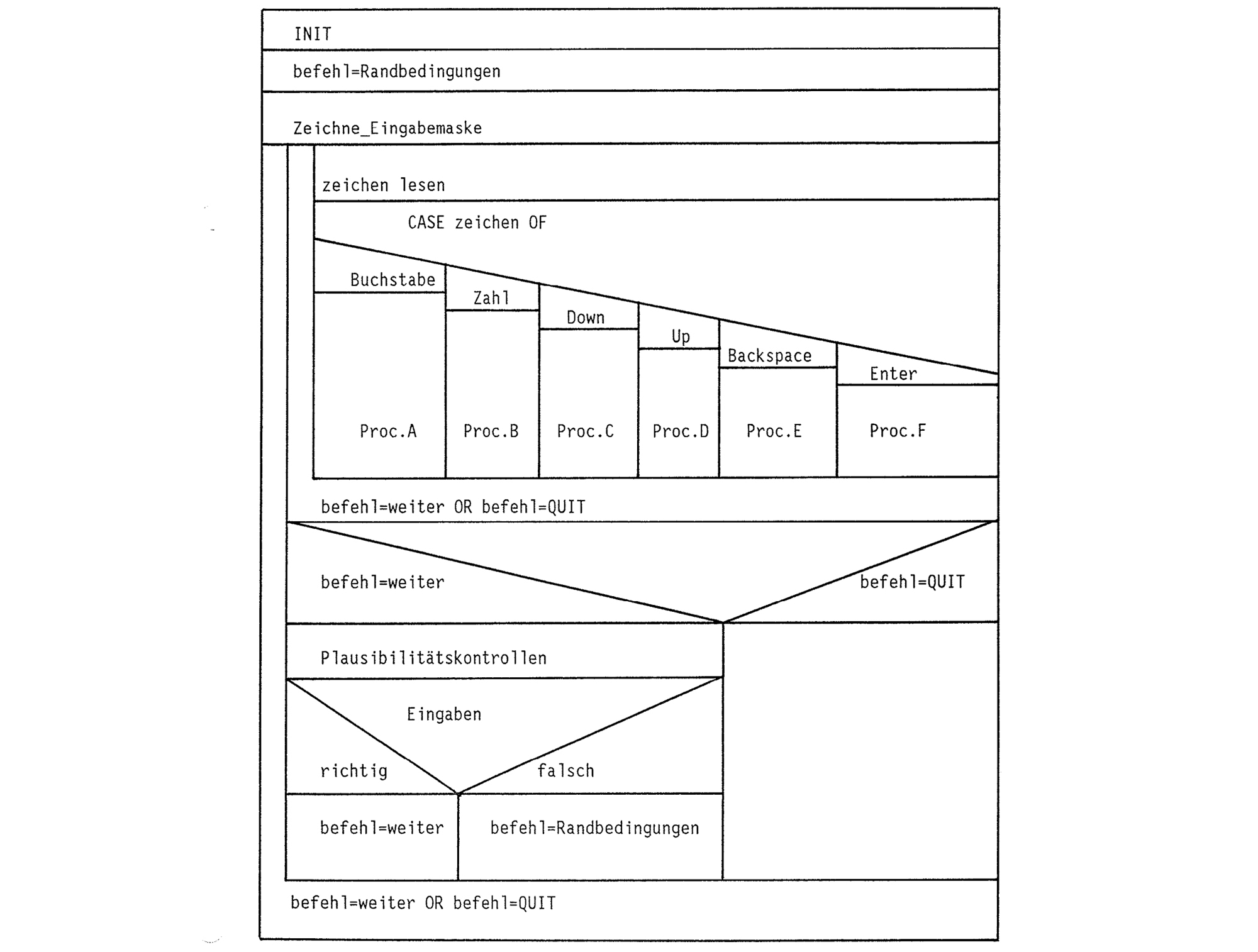
- Proc.A: Buchstabe lesen, in ein Feld speichern und auf der aktuellen Zeile schreiben.
- Proc.B: Zahl lesen, in ein Feld speichern und auf der aktuellen Zeile schreiben.
- Proc.C: Eine Zeile tiefer springen. Falls die unterste Zeile überschritten wird, auf die oberste springen.
- Proc.D: Eine Zeile höher springen. Falls die oberste Zeile überschritten wird, auf die unterste springen.
- Proc.E: Das der Zeile entsprechende Feld um ein Zeichen verkürzen, aktuelle Zeile verkürzt überschreiben.
- Proc.F: Falls Current-Zeile=weiter dann befehl=weiter Falls Current-Zeile=Quit dann befehl=QUIT sonst
eine Zeile tiefer springen. Falls die unterste Zeile überschritten wird, auf die oberste springen.
Verkettete Liste
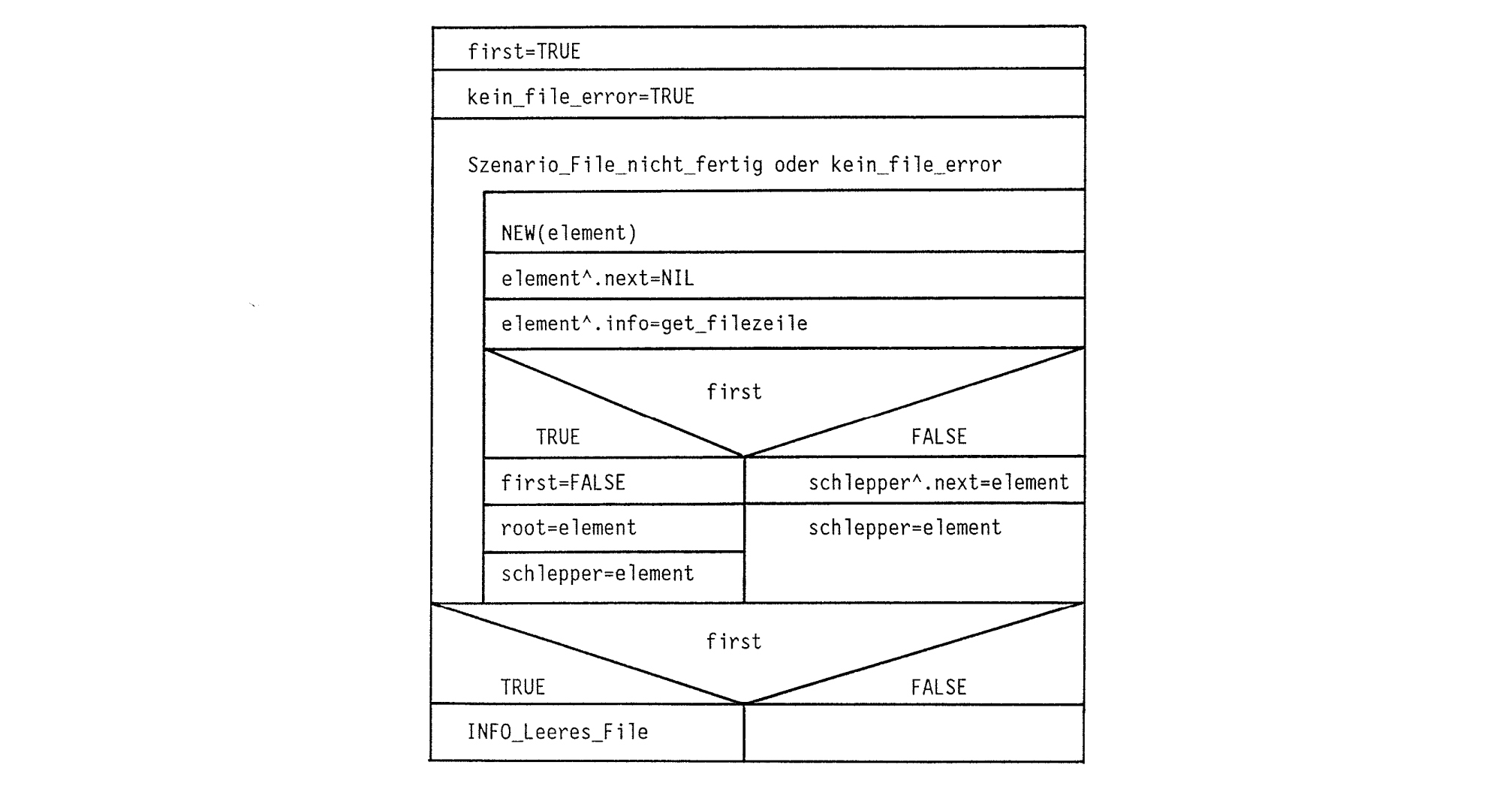
- Function get_filezeile Diese Funktion prüft die aus dem Szenario-File gelesene Zeile auf Plausibilität und setzt im Fehlerfall das Flag "kein_file_error" auf FALSE.
Motorstrom_Regler
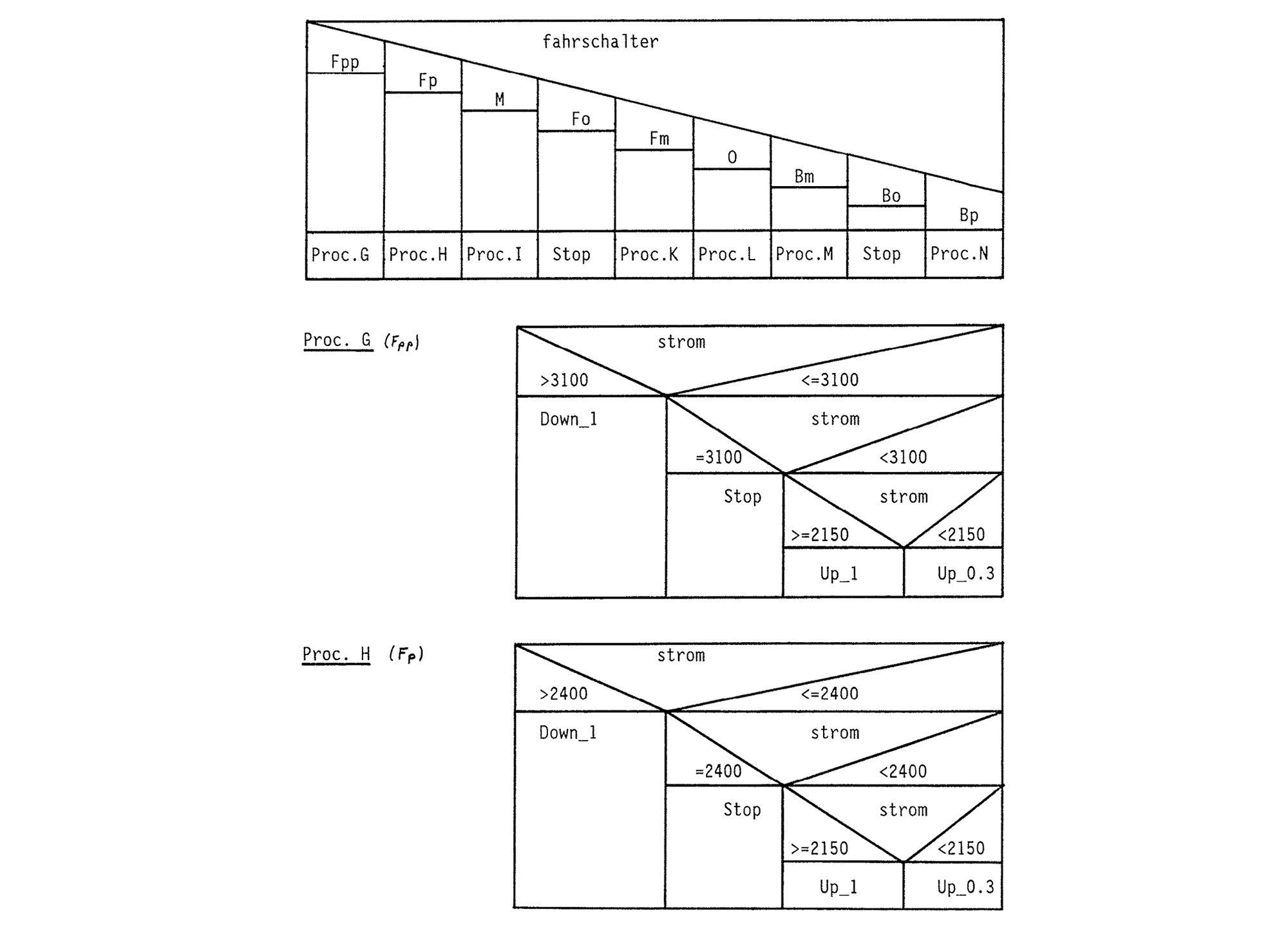
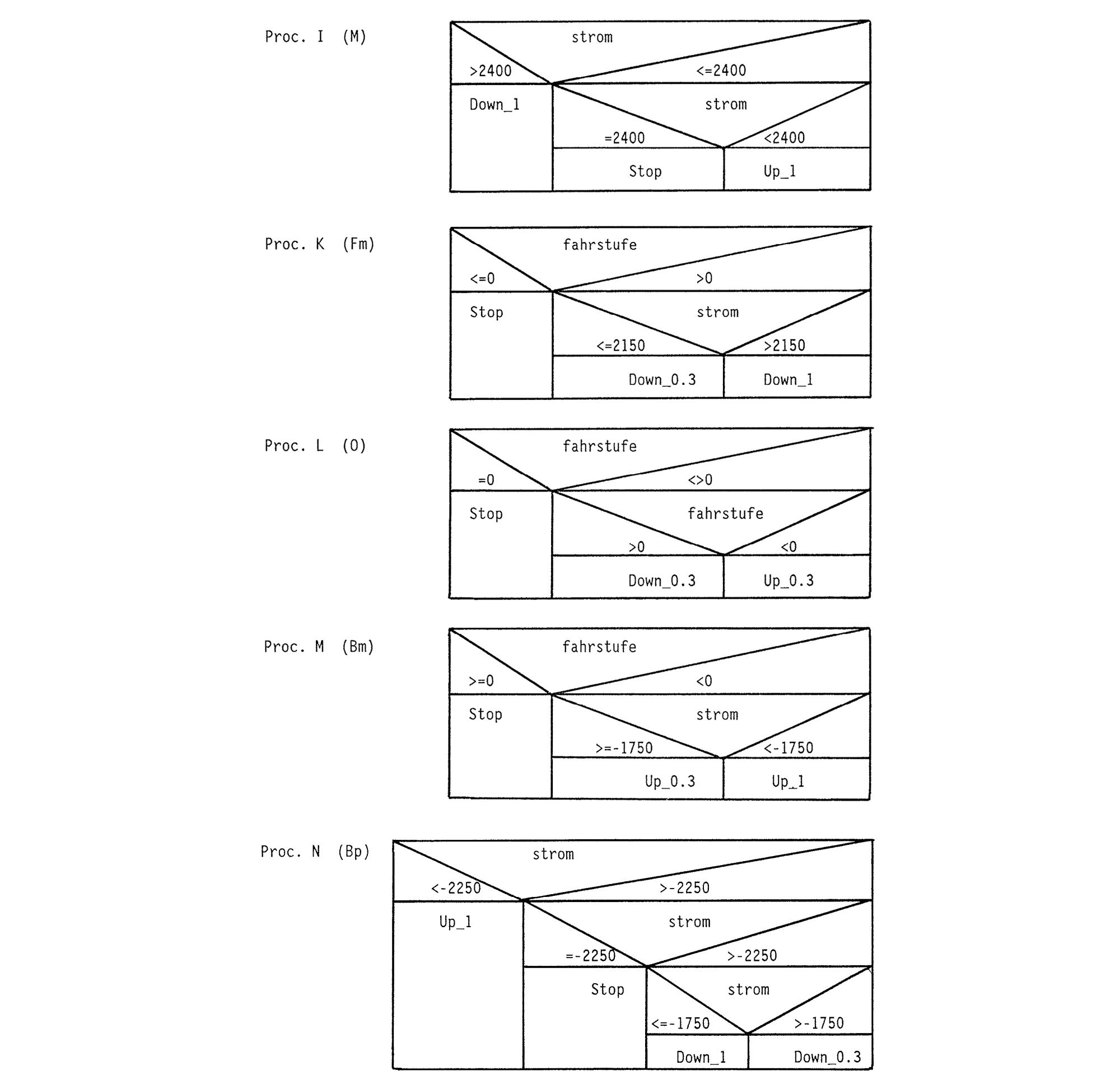
Fahrstufenschalter
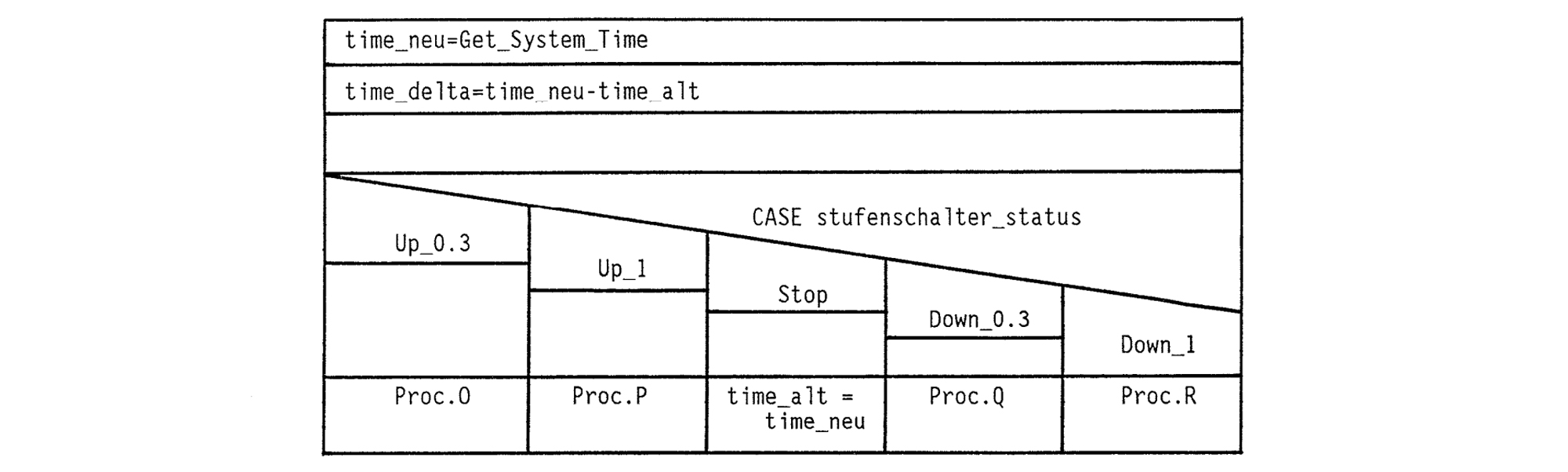
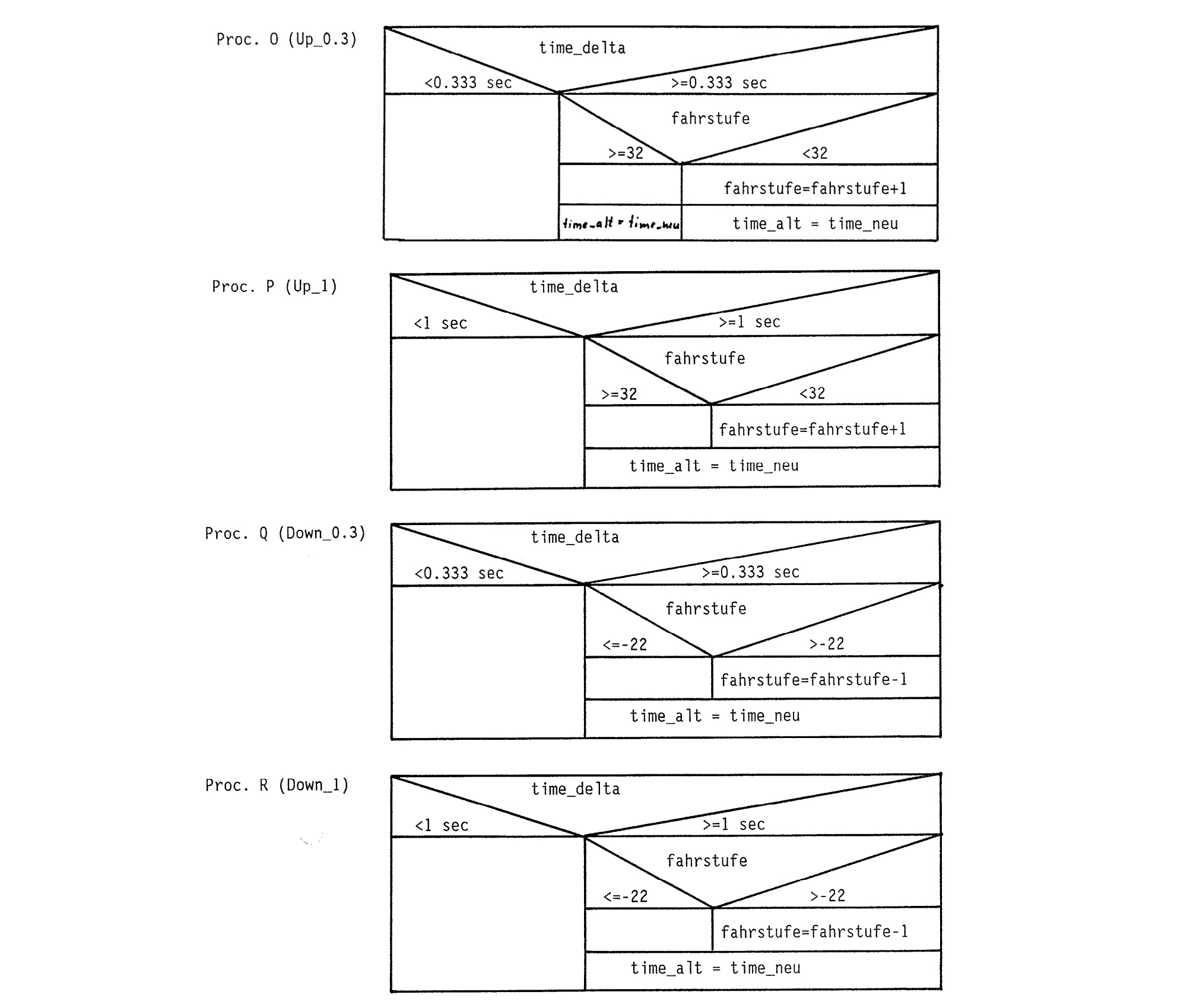
Lok_Simulieren
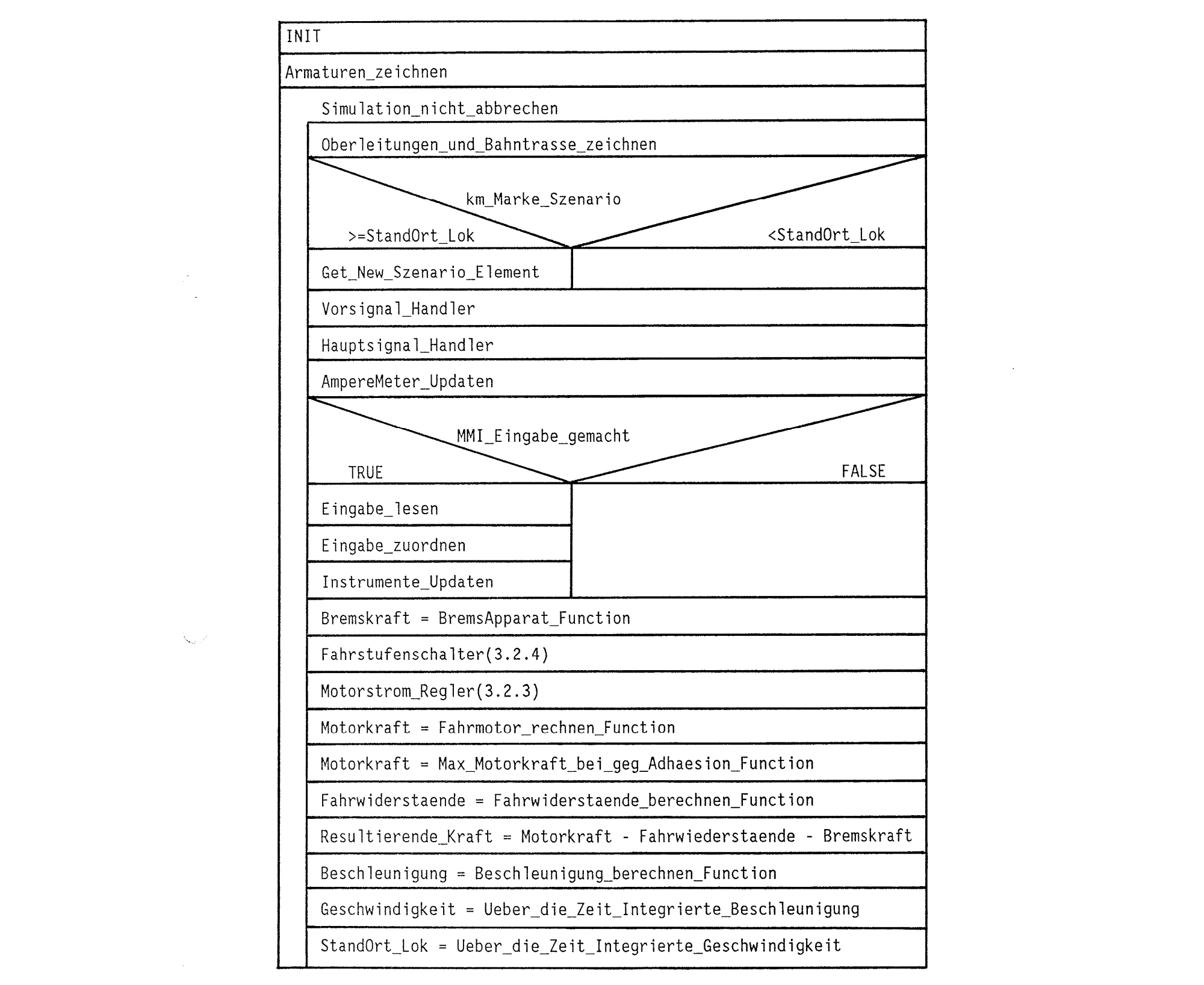
- Vorsignal_Handler: Sobald im Fahrszenario ein Vorsignal erscheint, wird dies solange angezeigt, bis Standort_Lok > Standort_Vorsignal
- Hauptsignal_Handler: Sobald im Fahrszenario ein Hauptsignal erscheint, wird dies solange angezeigt, bis Standort_Lok > Standort_Hauptsignal
- Brems_Apparat_Funct: Funktion die den gesamten Bremsmechanismus beschreibt und aus einem Luftdruck eine Bremskraft berechnet.
- Eingabe_zuordnen: Je nach Eingabe wird der dabei involvierte Parameter (z.B. fahrschalter=Fpp bei Betätigung des Fahrschalthebels) neu gesetzt.
Hauptprogramm
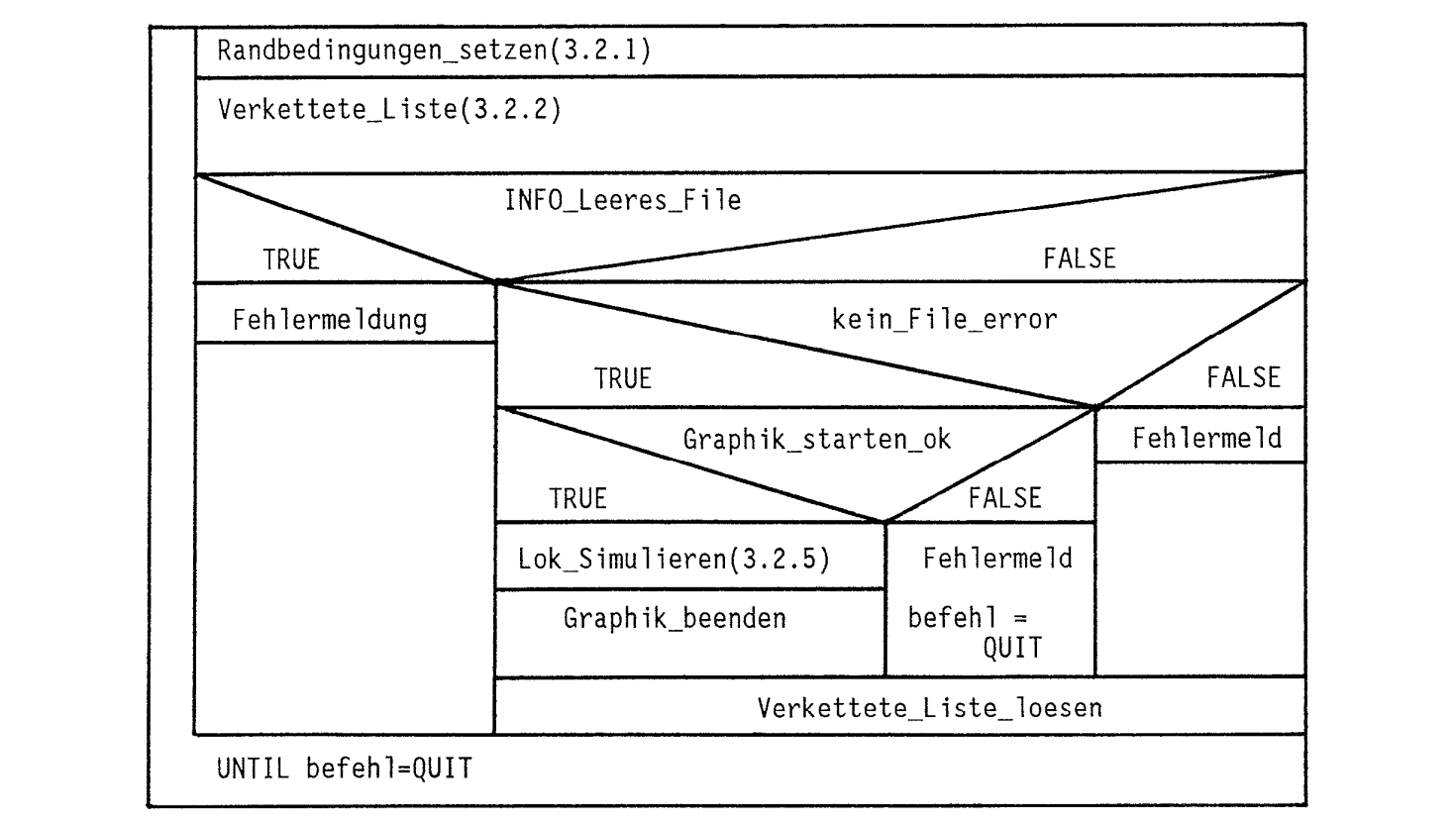
- Verkettete_Liste_loesen: Die verkettete Liste muss in allen Fällen wieder aufgelöst werden, weil sie in Verkettete_Liste(3.2.2) auch im Fehlerfall bis zu dem Element aufgebaut wird das falsch ist. Erst zum Zeitpunkt des Eintreffens eines Fehlers wird kein_File_error=FALSE gesetzt.
8. Das Fahrszenario
Der Zweck des Fahrszenario-Files ist die Wegbeschreibung der zu tätigen Bahnfahrt. Es werden folgende Ereignisse unterschieden:
- Vorsignal in x-Meter Entfernung, Fahrbegriff y anzeigend.
- Hauptsignal in x-Meter Entfernung, Fahrbegriff y anzeigend.
- Kurve mit Radius x-Meter.
- Trasse mit x-Promille Steigung.
Zu den Signalen ist folgendes zu ergänzen: Das Ereignis Signal tritt auf, wenn es in den Sichtbereich des Lokführers kommt. Mit x-Meter wird angegeben, wie weit es tatsächlich noch entfernt ist. Bei der virtuellen Signalanzeige des Lok-Simulators wird diese effektive Entfernung angegeben und je nach bewältigtem Weg nachgeführt.
Das Szenario-Fileformat
Vorsignal : kkkkk|S|xxxx|V|YY
kkkkk = Streckenkilometer
s = Signal
xxxx = Entfernung zum Signal
V = Vorsignal
yy = Fahrbegriff [FO|F1|F2|F3]
Hauptsignal: kkkkk|S|xxxx|V|YY
kkkkk = Streckenkilometer
s = Signal
xxxx = Entfernung zum Signal
V = Vorsignal
yy = Fahrbegriff [FO|F1|F2|F3]
Kurve : kkkkk|K|xxxx
kkkkk = Streckenkilometer
K = Kurve
xxxx = Kurvenradius in Meter (muss grösser 180m sein.)
Steigung : kkkkk|K|00xx
kkkkk = Streckenkilometer
N = Neigung
00xx = Angabe der Neigung (Zwischen 0 und 54, wird später
um 27 erniedrigt. (-27 .. +27)
Die Ereignisse müssen km-mässig aufwärtsfolgend sein.
Beispiel eines Fahrszenarios
Fahrszenario: Filename GOTTHARD.SZN
{lm : Nach 40m Hauptsignal mit Fahrbegriff 1 "Freie Fahrt"}
00001|S|0040|H|F1
{100m: 18%. Steigung}
00100|N|0037
{200 : Kurve mit Radius 200m}
00200|K|0200
{300 : Kurve mit Radius 0m}
00300|K|0000
{800m : Nach 500m Vorsignal mit Fahrbegriff 3 "Fahrt mit 65 km/h"}
00800|S|0500|V|F3
{1000m : Nach 600m Hauptsignal mit Fahrbegriff 3 "Fahrt mit 65 km/h"}
01000|S|0600|H|F3
{1410m : 0%. Steigung}
01410|N|0027
{2000m : Nach 600m Vorsignal mit Fahrbegriff 2 "Fahrt mit 40 km/h"}
02000|S|0600|V|F2
{2450m : Nach 600m Hauptsignal mit Fahrbegriff 2 "Fahrt mit 40 km/h"}
02450|S|0600|H|F2
{2900m : -27%. Steigung}
02900|N|0000
{3100 : Kurve mit Radius 500m}
03100|K|0500
{4000m : Nach 500m Vorsignal mit Fahrbegriff 0 "Halt"}
04000|S|0500|V|F0
{4450m : Nach 600m Hauptsignal mit Fahrbegriff 0 "Halt"}
04450|S|0600|H|F0
{4800m : 0%. Steigung (Bahnhof)}
04800|N|0027
{5053m : Nach 50m Hauptsignal mit Fahrbegriff 1 "Freie Fahrt"}
05053|S|0050|H|F1
{5100m : 27%. Steigung}
05100|N|0054
{5200 : Kurve mit Radius 220m}
05200|K|0220
{6000m: Nach 650m Vorsignal mit Fahrbegriff 2 "Fahrt mit 40 km/h"}
06000|S|0650|V|F2
{6200 : Kurve mit Radius 800m}
0620|K|0800
{6550m : Nach 400m Hauptsignal mit Fahrbegriff 2 "Fahrt mit 40 km/h"}
06550|S|0400|H|F2
{6800m : 15%. Steigung}
06800|N|0042
{8000m : Nach 600m Vorsignal mit Fahrbegriff 0 "Halt"}
08000|S|0600|V|F0
{8500m : Nach 1500m Hauptsignal mit Fahrbegriff 0 "Halt"}
0850|S1500|H|F0
Ein weiteres Beispiel:
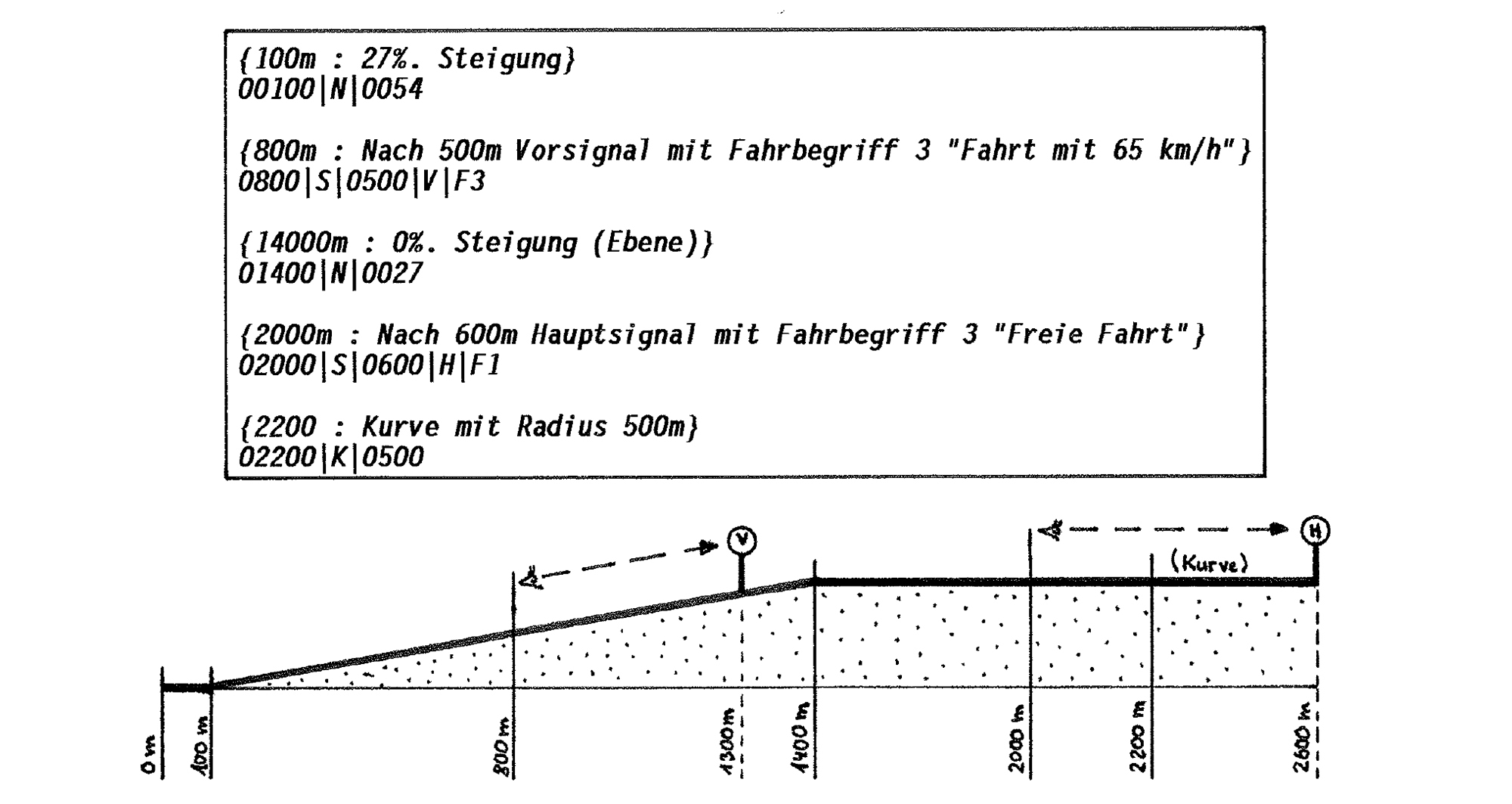
9. Das Benutzerhandbuch
1. Einleitung
Beim Lokomotiv-Fahrsimulator handelt es sich um eine Echtzeit-Simulation einer Fahrt mit der SBB-Elektrolokomotive Typ Re 6/6. Über die Tastatur kann die Lokomotive vorbildsgetreu bedient werden und die Anzeigeinstrumente zeigen realistische Werte an. Das Fahrgefühl wird durch die Sicht aus dem Frontfenster auf das Bahntrasse vermittelt, wobei in Abhängigkeit von der Geschwindigkeit Oberleitungsmasten an der Lok vorbeiziehen.
2. Anordnung der Bedien- und Ableseelemente in der Simulation
Auf dem Bildschirm werden während der Simulation die wichtigsten Anzeigeinstrumente angezeigt, wie:
- Amperemeter für den Fahrmotor in kA
- Hauptleitungsdruck in Bar
- Bremszylinderdruck der vordersten Lokomotivachse in Bar
- Geschwindigkeit in km/h
- Signalwarnlampe
- Schleuderwarnlampe
- Fahrschalthebel mit den Stellungen
Funktionstaste Fl = F++
Funktionstaste F2 = F+
Funktionstaste F3 = M
Funktionstaste F4 = F•
Funktionstaste F5 = F
Funktionstaste F6 = 0
Funktionstaste F7 = B
Funktionstaste F8 = B•
Funktionstaste F9 = B+ - Bremshebel mit den Bereichen 0 bis 9
Zahlentaste 0 = Bremsventil zu
Zahlentaste 9 = Bremsventil ganz offen
Zwischenwerte sind die Zahlentasten 1 bis 8 - Bremsauslösepedal Ein/Aus-Schalter
Erstes Mal Buchstabe B = Bremsauslösung
Ein Zweites Mal Buchstabe B = Bremsauslösung Aus - Signalquittierung
Impulstaste Buchstabe S = Signal quittiert
3. Programm starten
Nachdem das Programm durch Eingabe von BO_BO_BO gestartet wurde, erscheint eine Eingabemaske, wo man die Randbedingungen wie Anzahl Wagen, Gewicht usw. angeben kann. Diese Eingabemaske sieht so aus:
LOKOMOTIV-FAHRSIMULATOR ---Randbedingungen--- ————————————————————————————————————————————— Abbremsung (50..300%) : 160 Wagen-Gewicht (10..40 t) : 16 Wagen-Anzahl (1..50) : 30 Adhäsion (1..9) : 5 Pfad zum Szenario-File : D:\TP5\PRG\ Szenario-Filename: : ZUERICH.SZN SIMULATOR STARTEN PROGRAMM-EXITMit den Pfeiltasten bewegt man nun den invertierten Balken auf die Zeile, die man geändert haben möchte. Nun löscht man die Einträge mit der Backspace-Taste und ersetzt sie mit den gewünschten, wobei zu beachten ist, dass nur der Wertebereich in Klammern zulässig ist. Es ist nicht nötig, Einträge zu machen, dann werden einfach die gezeigten Werte (Default-Werte) übernommen. Die Simulation wird gestartet, indem man den Balken auf SIMULATOR STARTEN bewegt und die ENTER-Taste drückt. Dasselbe gilt für PROGRAMM-EXIT.
3.1 Erklärung der Randbedingungen
- Abbremsung: Qualität der Luftdruckbremsanlage.
50% bedeutet Geringe Wirkung.
300% = Sehr grosse Wirkung. (Nur bei Inter-City mit Scheibenbremsen) - Wagen-Gewicht: Gewicht eines Wagens.
- Wagen-Anzahl: Anzahl angehängte Wagen
- Adhäsion: Ergibt schlussendlich ein Reibungskoeffizient.
1 = Sehr schlechte Adhäsion (ca. μ=0.1)
9 = Sehr gute Adhäsion (ca. μ=0.4) - Pfad zum Szenario-File: Pfad zum Directory, in dem das Szenario-File liegt.
- Szenario-Filename: Szenario-File
Zur Zeit erhältlich:
• GOTTHARD.SZN
• AIROLO.SZN
• ZUERICH.SZN
4. Simulation starten
Nachdem die Randbedingungen erfolgreich gesetzt wurden, baut sich eine Führerstandskulisse auf dem Bildschirm auf. Wie man auf dem BZ- und HLD-Rundinstrument sieht, sind die Bremsen angezogen. Falls jetzt die Bremse ausgelöst würde (Taste B), hätte dies zur Folge, dass die Lokomotivbremse abschaltet. Dies kann man gerade einmal probieren. Man sieht, dass bei Bremsauslösung der BZ-Druck zusammenfällt und bei erneutem Betätigen der Taste B wieder hochschnellt. Nun löst man die Luftbremse durch betätigen der Taste 0 (Null). Jetzt kann die Lokomotive in Gang gesetzt werden. Dazu betätigen wir den Fahrschalthebel und setzten ihn auf F++, F+ oder M. Nun beginnt sich die Lokomotive zu bewegen.
4.1 Erklärung der Fahrschaltstellungen
Die Lokomotive greift über einen riesigen Drehschalter oder Stufenschalter verschiedene Fahrspannungen am Transformator ab und gibt sie
auf die Elektromotoren. Ist die Lok abgeschaltet liegt der Drehschalter in Mittelstellung.
Soll nun beschleunigt werden, muss der Drehschalter Schaltkontakt für Schaltkontakt im Uhrzeigersinn aufdrehen.
Dabei darf kein Schaltkontakt übersprungen werden. Bewegt sich der Drehschalter aus der Nullstellung im Gegenuhrzeigersinn,
wird den Elektromotoren nicht Strom zugeführt sondern entzogen (Rekuperieren). Dies hat eine Bremswirkung zur Folge
und ist neben der Druckluftbremse das zweite Bremssystem an Bord.
(An Fachleute : Diese Erklärung ist sinnbildlich zu verstehen)
- F++ Schnelles Aufschalten des Stufenschalters. (Stärkste Wirkung!)
- F+ Ncht so schnelles Aufschalten.
- M langsames Aufschalten.
- F• Der Stufenschalter bleibt auf dem Schaltkontakt stehen, den er soeben erreicht hat. Somit keine Zunahme der Zugkraft.
- F- Der Stufenschalter bewegt sich in die Mittelstellung zurück.
- 0 Lokmotor ist ausgeschaltet. (Stufenschalter in Mittelstellung)
- B+ Der Stufenschalter dreht im Gegenuhrzeigersinn auf und bewirkt eine Abbremsung. Diese Stellung ist nur Sinnvoll, wenn die Lokomotive fährt.
- B• Der Stufenschalter bleibt auf dem Schaltkontakt stehen, den er soeben erreicht hat. Somit keine Zunahme der Bremskraft.
- B- Der Stufenschalter bewegt sich in die Mittelstellung zurück.
4.2 Fehlmanipulationen
- Es macht kein Sinn, die Lokomotive zu beschleunigen F++ und gleichzeitig mit Druckluft zu bremsen. Dies würde die Lokomotive mit einer Zwangsabschaltung der Fahrmotoren quittieren.
- Wenn von F++ direkt in B+ geschaltet wird, werden die Motoren abgeschaltet und erst wieder eingeschaltet, wenn der Stufenschalter in die Ausgangslage, die Mittelstellung, zurückgekehrt ist.
- Wird mit Druckluft gebremst ohne die Lokbremsen auszulösen, wird die Lok ebenfalls zwangsabgeschaltet.
4.3 Fahren mit der Lokomotive
- Das Anfahren Während der Fahrt:
Den Fahrschalthebel je nach Erfordernissen auf M, F+ oder F++ stellen. - Abschalten der Zugkraft:
Den Fahrschalthebel in folgende Stellungen verbringen...
F+ oder F++, wenn die Zugkraft oder die Geschwindigkeit vergrössert resp. der Stufenschalter aufgeschaltet werden soll.
F• wenn der Stufenschalter auf der zuletzt angesteuerten Stufe stehen bleiben soll.
F- wenn die Zugkraft verringert, resp. der Stufenschalter zurückgeschaltet werden soll. - Aufschalten der elektrischen Bremse:
Den Fahrschalthebel in die Stellung F- verbringen und dort belassen, bis der Fahrmotorstrom auf etwa 800 Ampere gesunken ist. Nachher kann auf 0 geschaltet werden. Im Notfall ist der Fahrschalthebel sofort auf 0 zu stellen, bedingt durch das Abreissen der Zugkraft wird der Zug aber unangenehm erschüttert. Bei gelösten Druckluftbremsen an der Lokomotive, den Fahrschalthebel aus der Stellung 0 auf...
B+ drehen und beim Erreichen der gewünschten Bremskraft auf...
B• zurückstellen.
Genügt die von der elektrischen Bremse erzeugte Wirkung nicht, so ist zusätzlich die automatische Druckluftbremse des Zuges zu betätigen. Um ein Ausschalten der elektrischen Bremse zu verhüten, ist gleichzeitig die Bremsauslösung zu betätigen. - Abschalten der elektrischen Bremse:
Der Fahrschalthebel ist in die Stellung B- zu verbringen und dort zu belassen, bis der Bremsstrom mindestens auf 500 Ampere gesunken ist. Nachher kann auf 0 gestellt werden. Wird die elektrische Bremse bei Verwendung der Druckluftbremse und vergessener Bremsauslösung zwangsabgeschaltet, so ist der Fahrschalthebel sofort auf 0 zu stellen.
4.4 Signaltafeln
Auf der oberen rechten Bildschirmhälfte erscheinen die virtuellen Signale. Auf diese ist je nach gezeigtem Fahrbefel mit einer Geschwindigkeitssenkung oder einem Halt zu reagieren. Geschlossene Signale erzeugen ein Signalton und lassen eine Warnlampe aufleuchten. Durch betätigen der Taste S quittiert man ein solches Signal.
5. Verlassen der Simulation
Bei betätigen der Taste Q verlässt man die Simulation.